



















5 - 8
5. OPERATIONAL FUNCTIONS
5.3.3 Auxiliary command
The auxiliary command can be set in the following procedure.
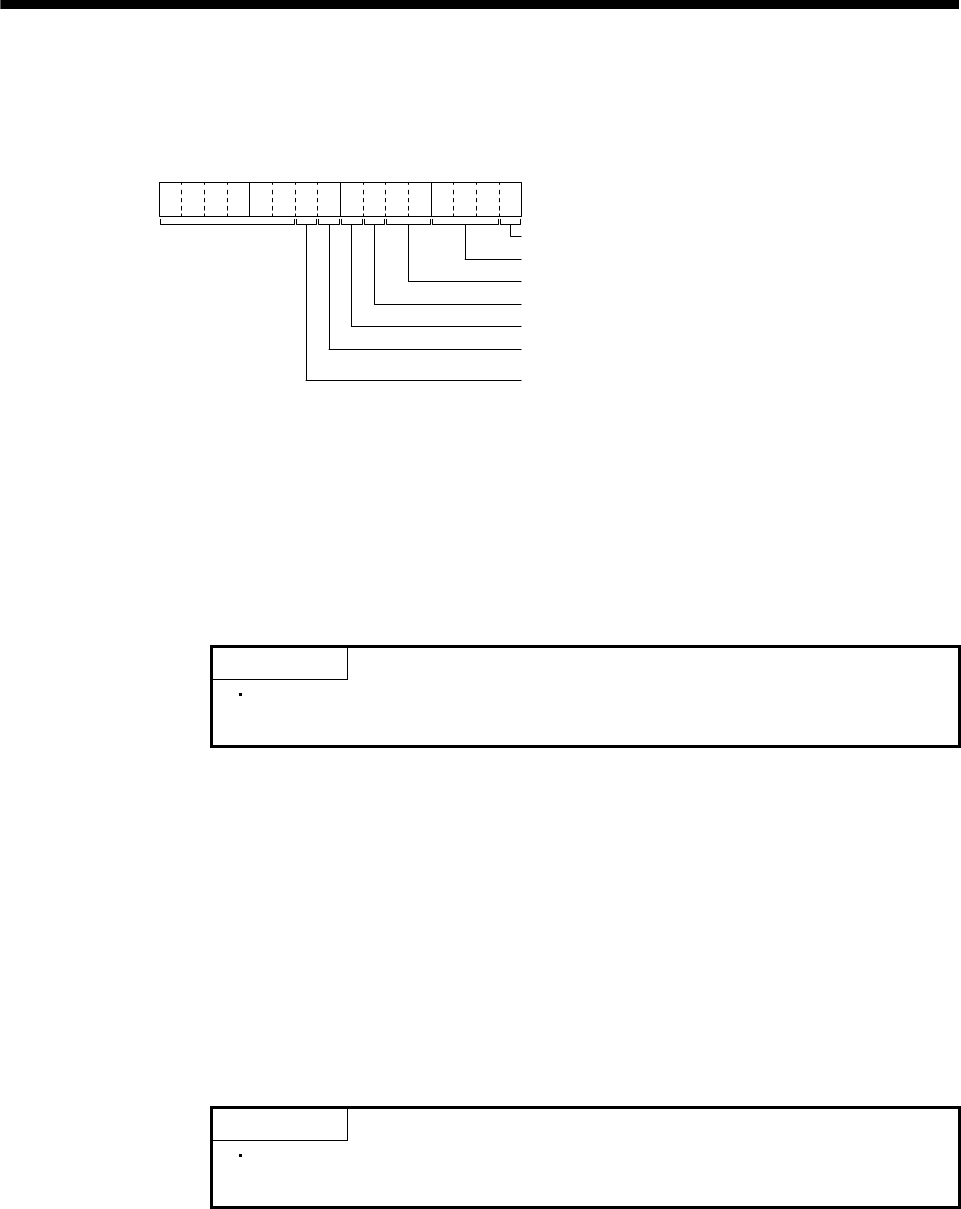
b15
0 0 0
b12
0 0 0
b8 b4
0 0 0
b0
Position command system(bit0)
Reserved(bit1 to 3)
Reserved(bit10 to 15)
Deceleration check system(bit4 to 5)
Speed switching point specification(bit6)
Dwell specification(bit7)
Pass position interrupt specification(bit8)
Continuous operation to torque control
specification(bit9)
(Example) For designation of position command system as 1 (relative position command) and
the deceleration check system as 2 (continue operation), set to "0021h".
(1) Position command system
Select the position data command system.
0: Absolute position command
1: Relative position command
POINT
If the setting of the position command system is incorrect, it causes a point
table setting error (operation alarm 25, detail 01) and operation is stopped.
(a) Absolute position command
Position data is position from the home position.
(b) Relative position command
Position data is the movement distance from the current command position.
(2) Deceleration check system
Designates the point movement completion conditions.
0: In-position stop
1: Smoothing stop
2: Continue operation
POINT
If the setting of the deceleration check system is incorrect, it causes a point
table setting error (operation alarm 25, detail 01) and operation is stopped.