



















6 - 29
6. APPLICATION FUNCTIONS
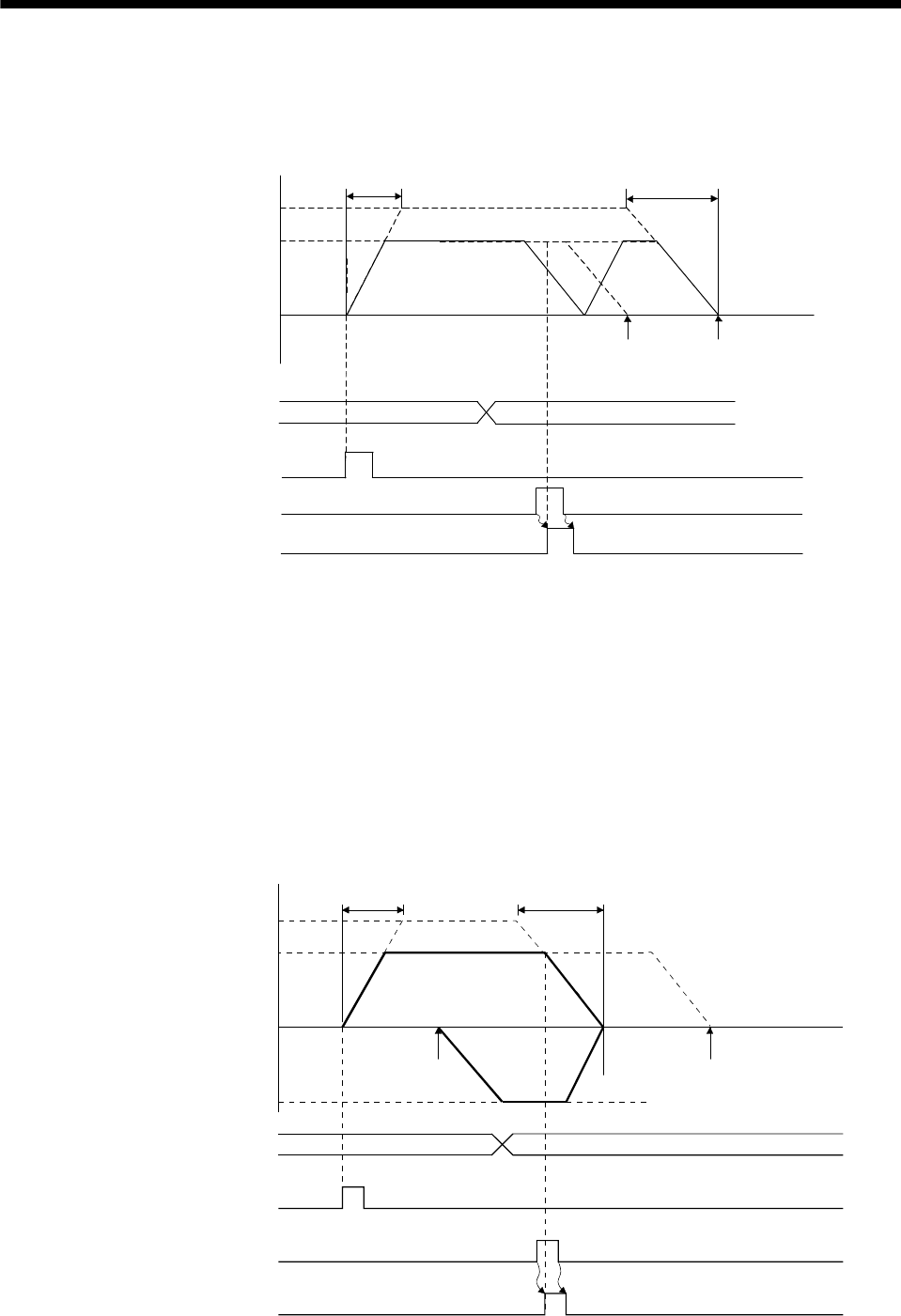
(2) When position change is performed during deceleration
When position change is performed during deceleration, the deceleration continues. After the axis stops,
the positioning to the new position is performed.
Speed limit value
Command speed
0
Acceleration time constant
Command position 2Command position 1
Command position 1 Command position 2
ON
OFF
ON
OFF
ON
OFF
Deceleration time constant
Start operation (ST)
Position change (PCHG)
Completion of preparation
for changing position (PCF)
(3) When the new position is already passed
For cases of the new position has already been passed or if the stop position after deceleration will pass
the new position, operation depends on operation modes.
(a) For automatic operation and incremental feed
For cases of changing position where the new position has already been passed or if the stop position
after deceleration will pass the new position, operation can be selected from "stop with an alarm" or
"after deceleration and stop return to new position" using control option 2 (parameter No.0201).
The case for returning to the new position after deceleration and stop is shown in the next diagram. At
this time the stop position over-bound signal (POV) is turned on (the stop position over-bound signal
(POV) is turned off at the next start up).
Position change (PCHG)
Completion of preparations
for changing position (PCF)
ON
OFF
Start operation (ST)
ON
OFF
ON
OFF
Acceleration time constant Deceleration time constant
Speed limit value
Command speed
Command
position 2
Command position 1
0
Command position 1 Command position 2