



















5 - 33
5. OPERATIONAL FUNCTIONS
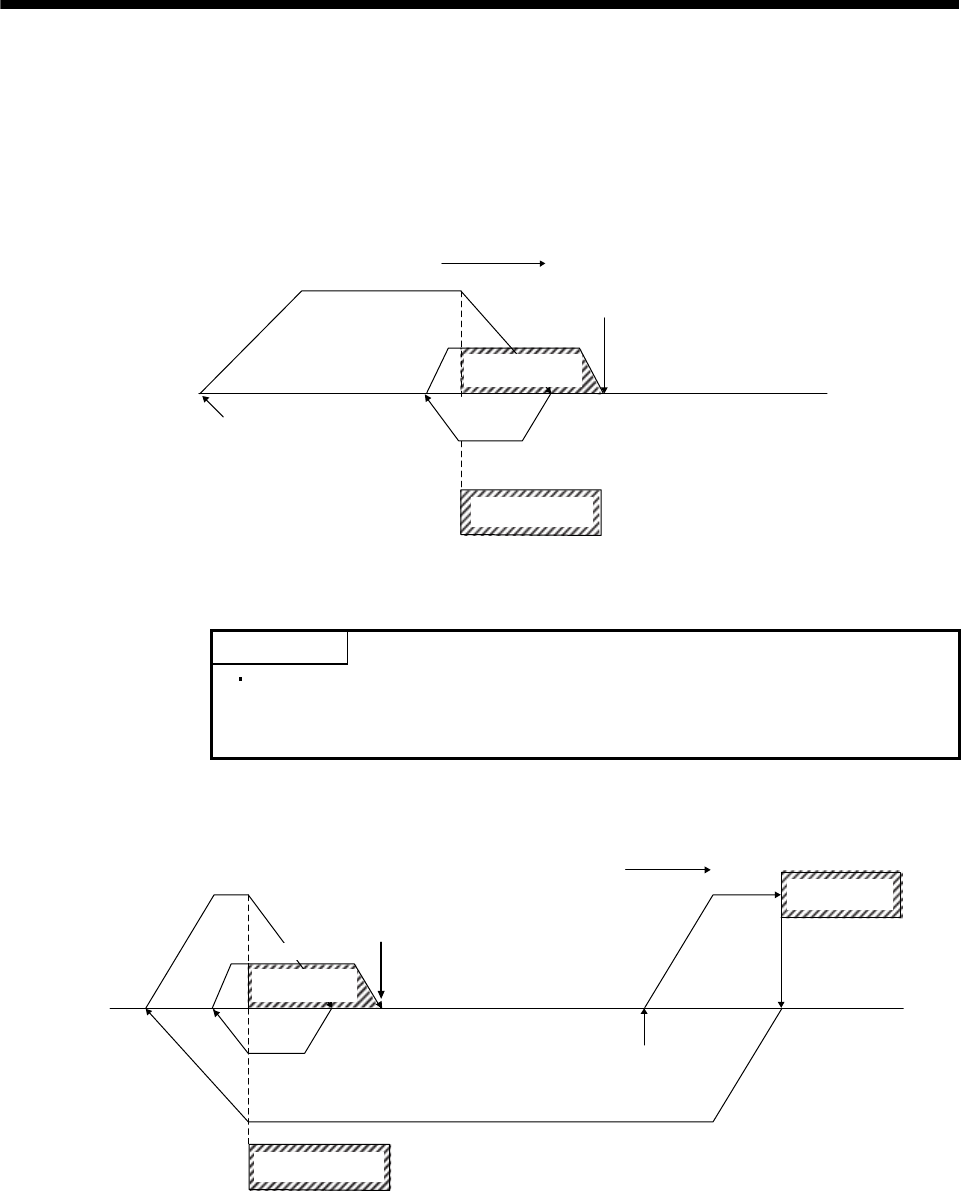
5.5.10 Home position return using a dog front end method
In the home position return using a dog front end method, the motion detected by the proximity dog slows
down to stop, and return to the proximity dog front end, setting there to the home position.
(1) When there is a proximity dog in the direction of home position return
Speed
Home position return direction
Home position return speed
Creep speed
Start operation
Home position
(Note 1)
(Note 2)
Proximity dog
Amount of home
position shift
Note 1. The amount of home position offset is set to the amount of shift in the home position (parameter No.0248, 0249).
2. If the amount of shift in the home position is zero, the servo stops at the proximity dog front end.
POINT
A dispersion of the home position occurs depending on the detection timing of
the dog front end. When this dispersion is a problem, the dispersion can be
smaller by reducing the creep speed.
(2) When the proximity dog is in the opposite direction against the direction of home position return
Speed
Home position return speed
Home position
Creep speed
Home position return speed
Home position return direction
Start operation
Creep speed
Limit switch
Proximity dog
Amount of home
position shift