



















App. - 16
APPENDIX
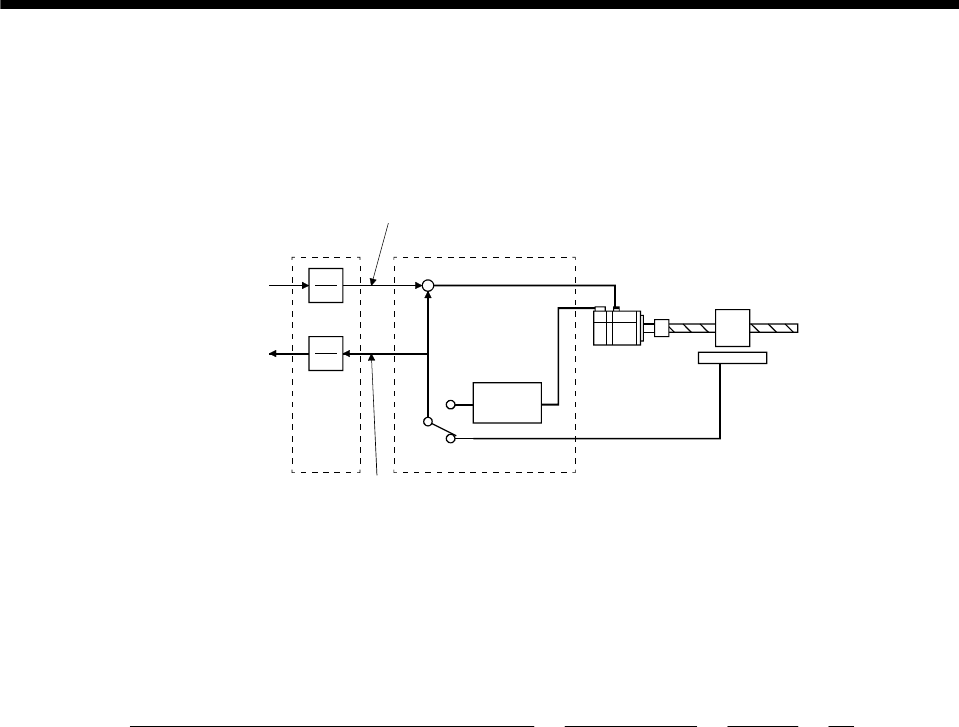
3) Setting example of electronic gears
For the electronic gear numerator (CMX), set the number of linear encoder pulses (= load side
resolution unit) per revolution of the servo motor, not the number of pulses per revolution of the servo
motor.
CMX
CDV
Servo motor Linear encoder
Position feedback
[µm]
Command
[µm]
+
-
CDV
CMX
Electronic
gear
User
Position
board
Servo amplifier
Load side resolution unit
Load side resolution unit
Conditions:
Command unit: µm
Ball screw lead: 20 mm
Linear encoder resolution: 0.05 µm
Ball screw lead / Linear encoder resolution = 20 mm / 0.05 µm = 400000 pulses
(CDV) [µm] revolution per distance Travel
(CMX) [pulse] revolution per pulses of Number
=
mm 20
pulses 400000
=
20000
400000
=
1
20