











App. - 63
APPENDIX
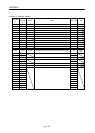
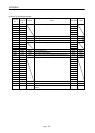
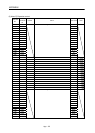
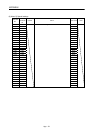
App. 5.16.3 Control parameters
For control parameters, only the additions and changes are listed.
Parameter
No.
Symbol Name
Initial
value
Unit
Setting
range
Function
When
tandem drive
is being
used
021E *CODE Type code
1000h 0000h to
FFFFh
Set the type code.
[When SSCNET communication method is SSCNET
/H]
1000: MR-J4(W
)- B
[When SSCNET communication method is SSCNET
]
0100: MR-J3-B, MR-J3W-B (for rotary servo motor)
0101: MR-J3-BS, MR-J3-B-RJ006
0107: MR-J3-B-RJ080W
0102: MR-J3-B-RJ004,
MR-J3W-B (for linear servo motor)
0180: MR-J3W-0303BN6
Same value