

















8 - 14
8. TANDEM DRIVE
b) Start operation method
1. Set the home position return method (parameter No.0240) to "Dog front end method" and
tandem drive option (parameter No.0265) to "Normal mode".
2. Set the tandem drive home position signal offset (parameter No.026C, 026D).
3. Start home position return operation.
Note. Through setting the amount of home position shift (parameter No.0248, 0249), the position shifted from dog front
end position can be defined as the home position.
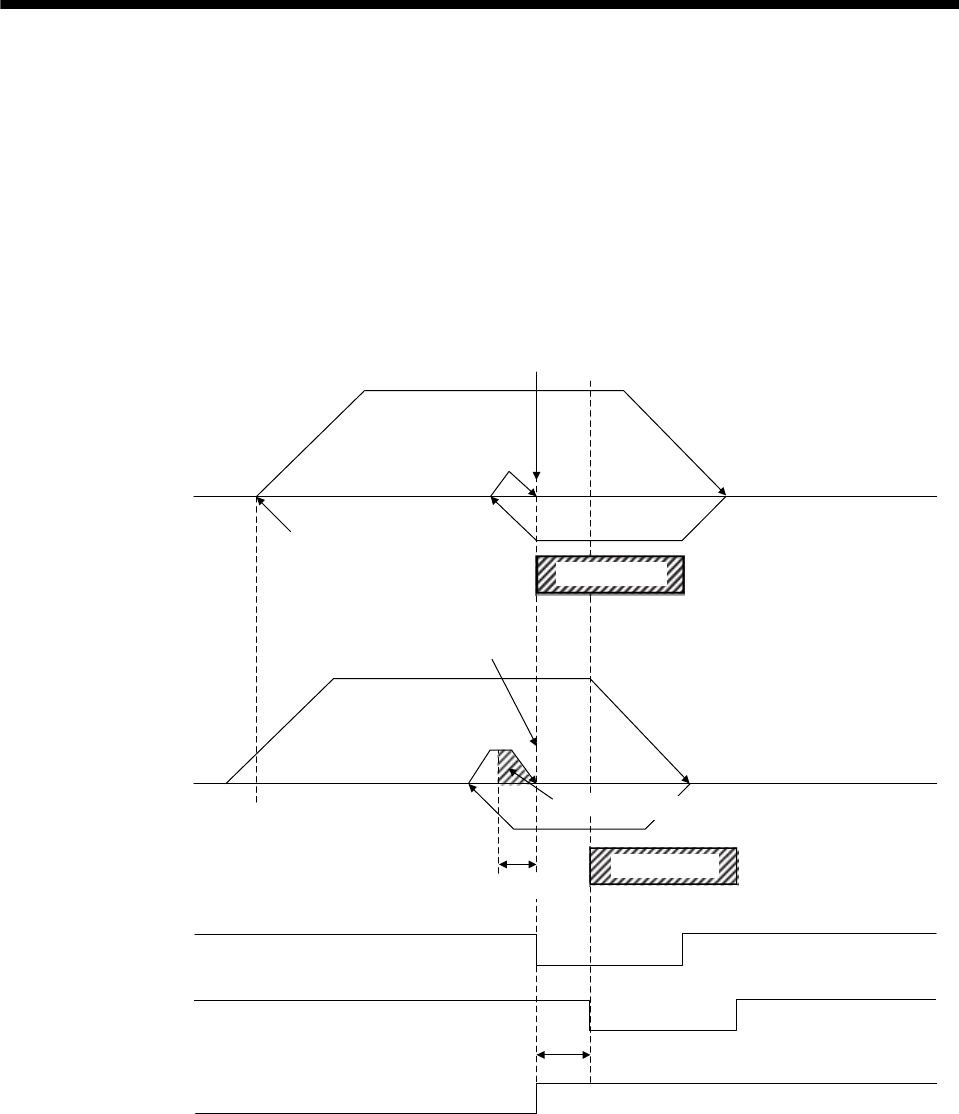
c) Operation example for normal mode
Tandem drive home position signal offset
Home position return speed
Creep speed
Proximity dog
Proximity dog
Speed (master axis)
Speed (slave axis)
Proximity dog signal
(DOG) (master axis)
Home position return
complete (ZP)
Home position
Proximity dog signal
(DOG) (slave axis)
Start operation
Home position
Deviation
Amount of deviation compensation