

















8 - 8
8. TANDEM DRIVE
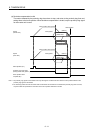
(2) Home position return using the dog cradle method
ON
OFF
ON
OFF
ON
OFF
Creep speed
Creep speed
Home position
Proximity dog
Home position return speed
Home position return
complete (ZP)
(master axis)
Proximity dog input
signal (DOG)
(master axis) (Note 1)
Start operation (ST)
(master axis)
Speed
(slave axis)
Z-phase pulse
(master axis)
Speed
(master axis)
Home position return speed
Amount of home
position shift (Note 2)
Amount of home
position shift (Note 2)
Note 1. The proximity dog signal for the master is the only valid signal. The slave axis also returns to home position based on the dog
signal for the master.
2. The final stop position for both the master axis and the slave axis is based on the final master axis motor Z-phase.
Also, only the master axis parameter for the value for the home position shift amount is valid.