



















9 - 5
9. INTERFACE MODE
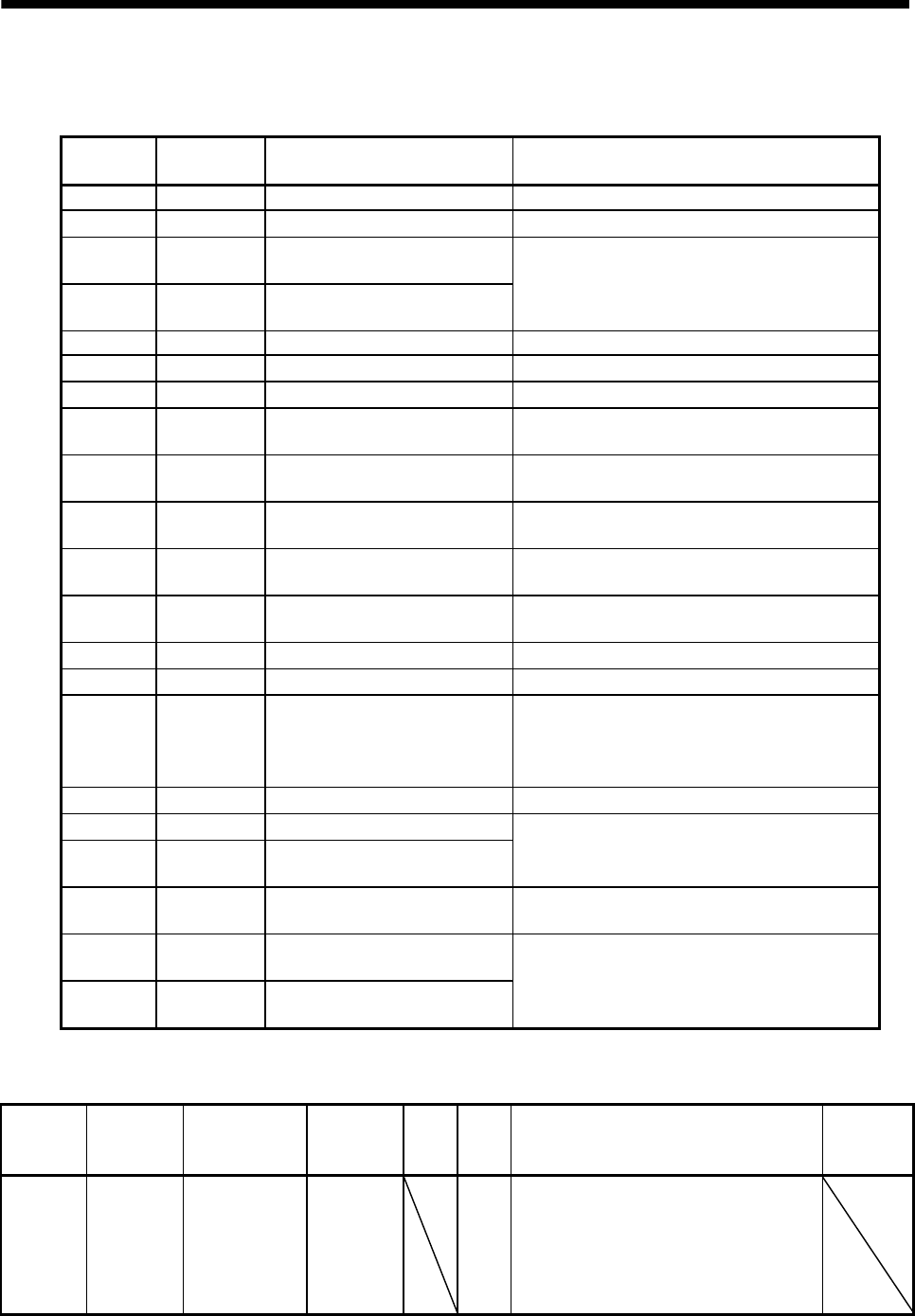
(3) Control parameters
(a) Control parameters used
Parameter
No.
Abbreviation Name Remarks
0200 *OPC1 Control option 1 Speed units relates to the units during monitor output.
0203 *AXALC Axis No. assignment
020E SUML Speed units multiplication factor
(lower)
Speed units multiplication factor relates to the units
during monitor output.
020F SUMH Speed units multiplication factor
(upper)
0210 TLP Forward rotation torque limit value
0211 TLN Reverse rotation torque limit value
0213 *GIOO General input/output option
0214 *GDNA General input/output number
assignment
0219 *SOP Sensor input options Sets the source of input for LSP/LSN/DOG signals.
Each signal is used in monitor output only.
021A *SLSP Sensor signal (LSP) connection
specification
021B *SLSN Sensor signal (LSN) connection
specification
021C *SDOG Sensor signal (DOG) connection
specification
021D *VEND Vendor ID
021E *CODE Type code
023F *IFBN Interface mode maximum buffer
number
Designates the maximum buffer number of the
command buffer.
Note. When controlling by interface mode with
interrupt output invalid, 1 or more must be set.
0241 *OPZ2 Home position return Option 2 Can set valid/invalid of system only.
0246 ZPSL Home position coordinates (lower) Set only for absolute position system.
0247 ZPSH Home position coordinates
(upper)
024D *LSO Home position multiple revolution
data
Set only for absolute position system.
024E *CYOL Home position within 1 revolution
position (lower)
Set only for absolute position system.
024F *CYOH Home position within 1 revolution
position (upper)
(b) Parameter details
The parameter details regarding interface mode are shown below.
Parameter
No.
Abbreviation Name Initial value Units
Setting
range
Function
When in
tandem
drive
023F *IFBN Interface mode
maximum buffer
number
0 0
to
63
Sets the maximum value of the ring buffer
number being used in interface mode. The
set value+1 is the number of buffers.
Note. When controlling by interface mode
with interrupt output invalid, 1 or more
must be set.