















11 - 32
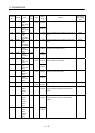
11. PARAMETERS
Parameter
No.
Symbol Name
Initial
Value
Units
Setting
range
Function
When tandem
drive is being
used
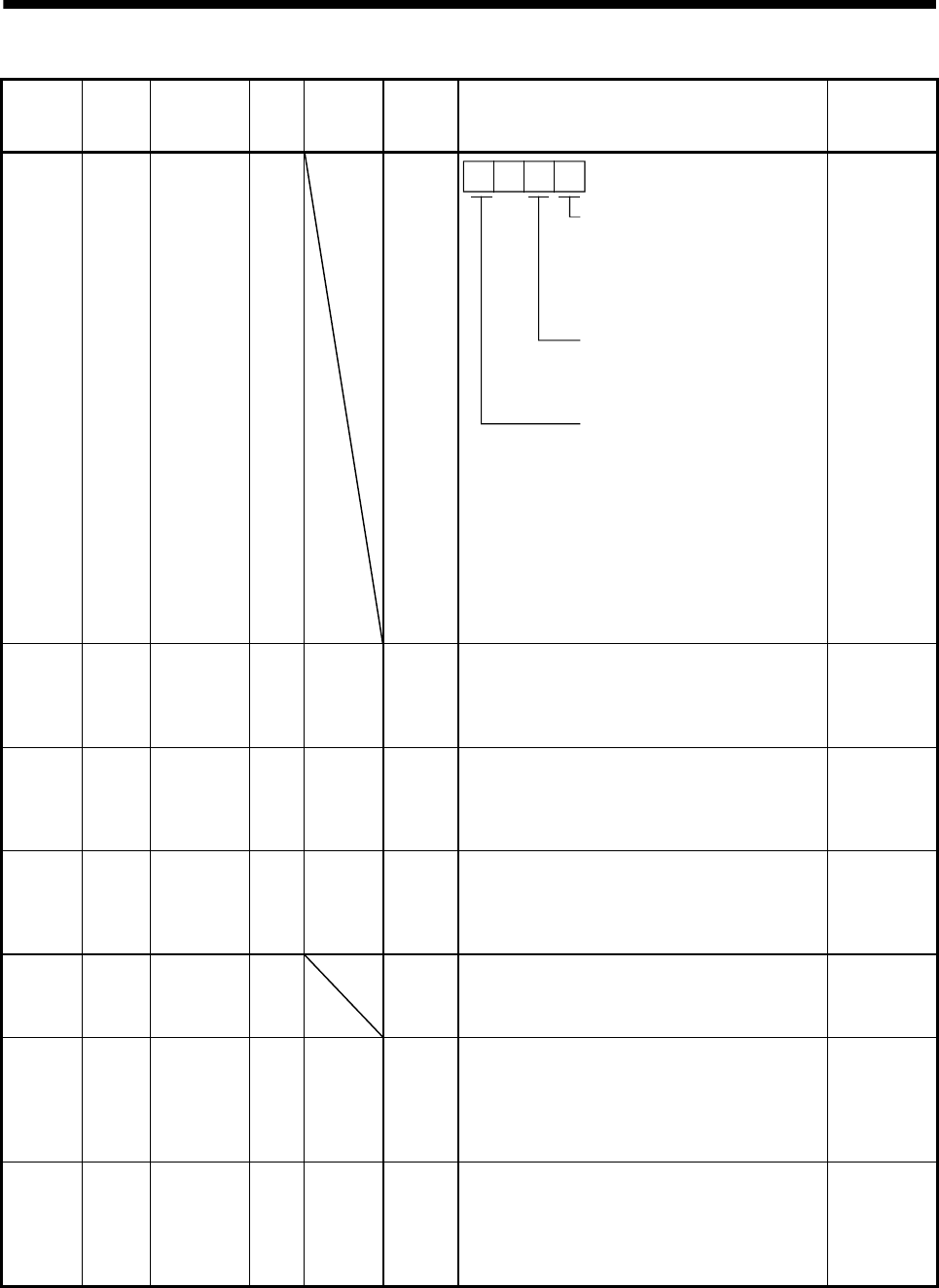
0265 TOP Tandem
drive options
0000h 0000h
to 1011h
0
Synchronization setting
Set the validity/invalidity of
synchronization for turning servo on.
0: Valid
1: Invalid
Compensation of home position
return deviation
Set the validity/invalidity of deviation
compensation for home position
return.
0: Deviation compensation invalid
1: Deviation compensation valid
(Note) In home position return using
a scale home positon signal
detection method, the
deviation compensation
becomes valid regardless of
this setting.
Method of to home position return
Set the operation method when the
scale home position signal
detection method is used for return
to home position.
0: Normal mode
1: Adjustment mode
Master
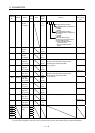
0266 *TEV Tandem
drive
synchronous
alignment
valid width
10000
Command
Units
0 to
32767
Set the valid width for performing compensation of
the deviation between the master axis and slave
axis when the servo is turned on. (0: The check with
the synchronous alignment valid width is invalid.)
Master
0267 *TES Tandem
drive
synchronous
alignment
speed
10000 Speed
Units
1 to
32767
Set the speed for performing compensation of the
deviation between the master axis and slave axis
when the servo is turned on.
Master
0268 *TEO Tandem
drive
excessive
deviation
width
10000
Command
Units
0 to
32767
Set the detection level for the excessive deviation
alarm for deviation between the master axis and the
slave axis.
(0: The check with the excessive deviation width is
invalid.)
Master
0269 *TMAG Tandem
drive unit
multiplication
factor
1 1 to
32767
Set the multiplication factor for excessive deviation
width, synchronization speed, and synchronization
valid width for tandem drive axes.
Master
026A *TED Late starting
of tandem
drive
excessive
deviation
detection
50 ms 0 to 500 Set the delay time for from completion of
synchronization for turning servo on until detection
of excessive deviation is started.
Master
026B *TOFL Valid width of
tandem drive
deviation
compensation
10000
Command
Units
0 to
32767
Set the permissible width for performing
compensation of the deviation between the master
axis and slave axis when home position return is
performed while in tandem drive axes mode. (0: The
check with the valid width of deviation compensation
is invalid.)
Master