

















8 - 13
8. TANDEM DRIVE
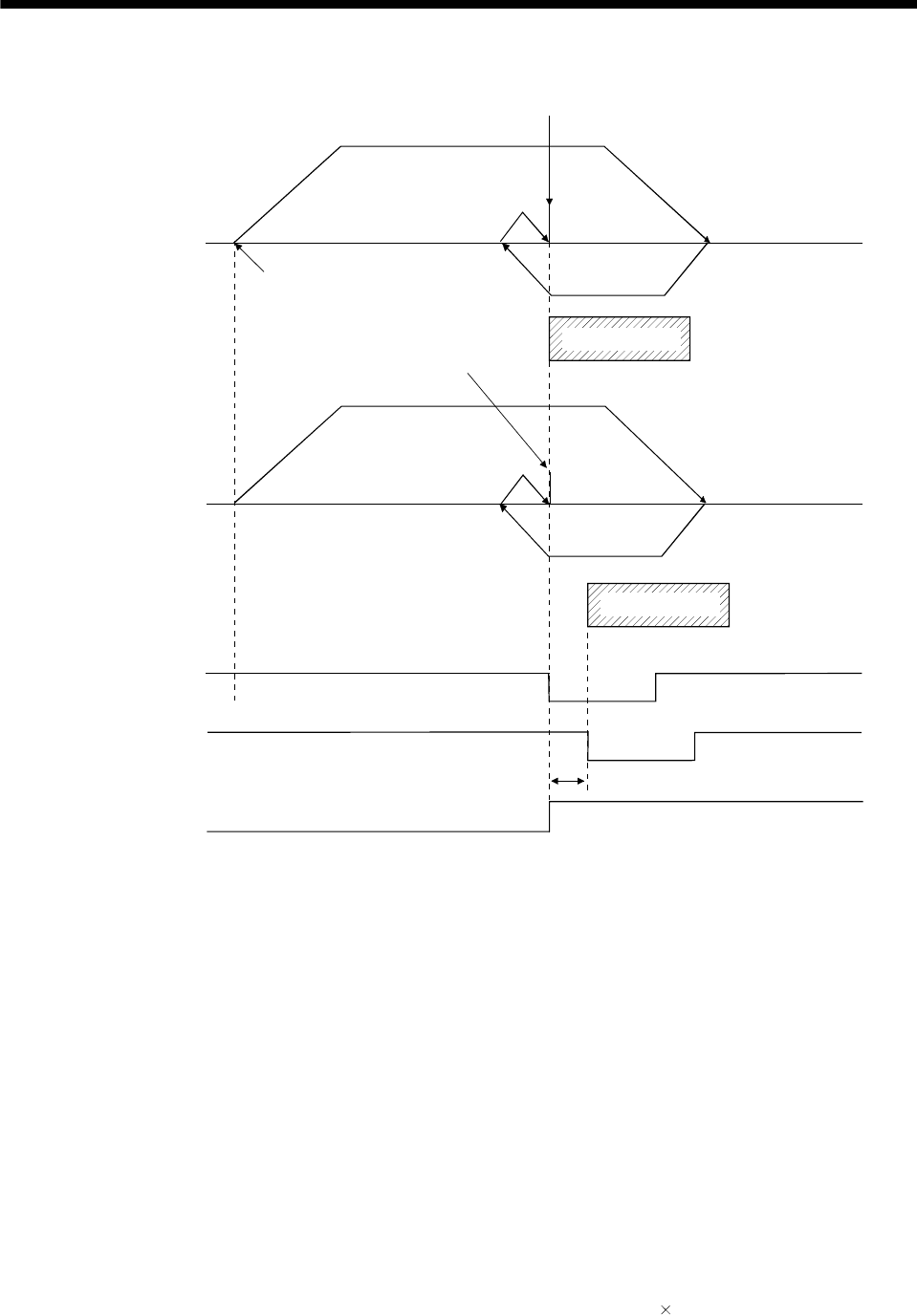
c) Operation example for adjustment mode
Tandem drive home position signal offse
t
Home position
Home position
Creep speed
Proximity dog
Start operation
Home position return speed
Proximity dog
signal (DOG)
(master axis)
Proximity dog
signal (DOG)
(slave axis)
Home position
return complete
(ZP)
Proximity dog
Speed (master axis)
Speed (slave axis)
2) Normal mode
a) Summary
In normal mode, the amount of deviation between the master axis and slave axis is detected and
tweaking (compensation of deviation between master axis and slave axis) is performed. This
movement sets the axis linking the master axis and slave axis mechanically at a right angle to the
movement direction.
When home position return is performed using normal mode, after detecting the master axis dog
front end position and slave axis dog front end position while returning to home position, calculate
the deviation of the master axis and slave axis based on the tandem drive home position signal
offset (parameter No.026C, 026D). The master axis moves to the dog front end position and the
slave axis moves to the slave axis home position calculated based on the tandem driver home
position signal offset and the previously noted deviation.
Note 1. When performing home position return in normal mode, set the tandem drive home position signal offset
(parameter No.026C, 026D) to the correct value. If the tandem drive home position signal offset value is
erroneous, the axis that links the master axis and slave axis will not be at a right angle.
2. If the amount of deviation between the master axis and the slave axis exceeds the value calculated from the
valid width of tandem drive deviation compensation (parameter No.026B)
tandem drive deviation
compensation units multiplication (parameter No.026E), an exceeding of valid width of tandem drive deviation
compensation error (operation alarm 57, detail 01) occurs and home position return operation is terminated.
(Tweak movement is not performed.)