


















6 - 30
6. APPLICATION FUNCTIONS
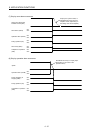
(b) For linear interpolation operation
When one or more axes in a linear interpolation group reverse the movement direction because of the
position change, all axes in the group automatically decelerate and stop. After the stop, the axes return
to the new position. The setting of control option 2 (parameter No.0201) is invalid. At this time, the stop
position over-bound signal (POV) remains off.
A
xis 2
Axis 1
Start position
New position P2 (P2x, P2y)
Position change
Original position P1 (P1x, P1y)
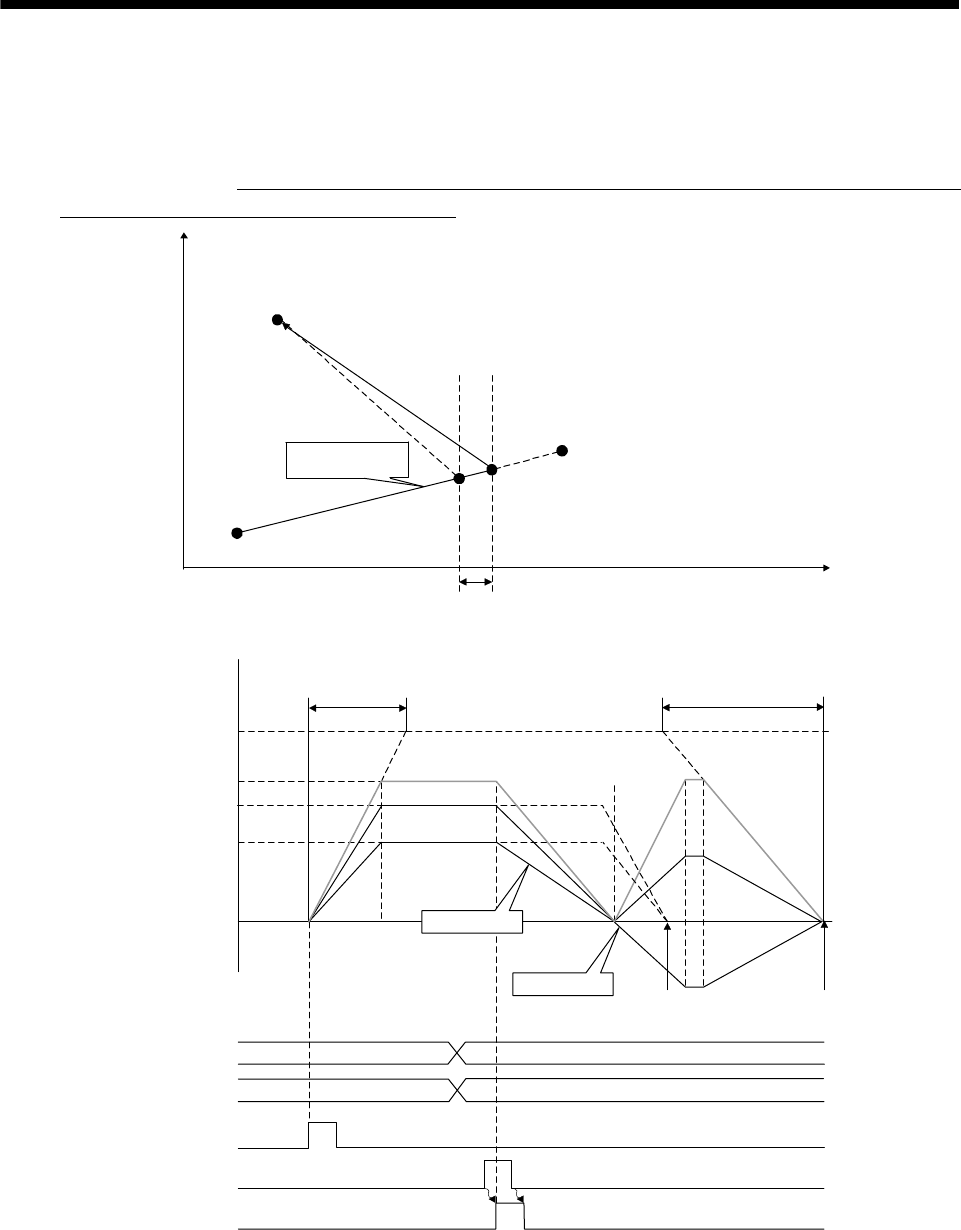
Excessive position amount
Acceleration time constant
Linear interpolation
speed limit value
Command speed
(Vector speed)
0
Deceleration time constant
Command position P2xCommand position P1x
Command position P2yCommand position P1y
Command position P1x Command position P2x
Start operation (ST)
Position change (PCHG)
Completion of preparation
f
or changing position (PCF)
ON
OFF
ON
OFF
ON
OFF
Command position P1y Command position P2y
Command position (axis 1)
Command position (axis 2)
Axis 2 speed
Axis 1 speed