

















11 - 30
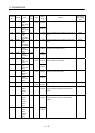
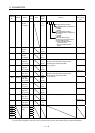
11. PARAMETERS
Parameter
No.
Symbol Name
Initial
Value
Units
Setting
range
Function
When tandem
drive is being
used
0242 ZSPL Home
position
return speed
(
lower
)
00C8h Speed
Units
0000h
to FFFFh
Set the moving speed for home position return.
Master
0243 ZSPH Home
position
return speed
(upper)
0000h 0000h
to 7FFFh
0244 ZTC
A
Home
position
return
acceleration
time constan
t
100 ms 0 to 20000 Set the acceleration time constant for home position
return.
Master
0245 ZTCD Home
position
return
deceleration
time constan
t
100 ms 0 to 20000 Set the deceleration time constant for home position
return.
Master
0246 ZPSL
Home
position
coordinates
(lower)
0000h
Command
Units
0000h
to FFFFh
Set the home position coordinates (position after
completing home position return).
Master
0247 ZPSH
Home
position
coordinates
(upper)
0000h 0000h
to FFFFh
0248 ZSTL
Amount of
home
position shift
(lower)
0000h
Command
Units
0000h
to FFFFh
Set the amount of shift from the Z-phase pulse
detection position of the detector.
Master
0249 ZSTH
Amount of
home
position shift
(upper)
0000h 0000h
to FFFFh
024A ZLL
Home
position
search limit
(lower)
0000h
Command
Units
0000h
to FFFFh
Set a limit on the movement amount when
searching for the home position.
Master
024B ZLH
Home
position
search limit
(upper)
0000h 0000h
to 7FFFh
024C CRF Creep speed 0014h Speed
Units
0000h
to 7FFFh
Set the creep speed after detecting the proximity
dog.
Master
024D *LS0 Home
position
multiple
revolution
data
0000h rev 0000h
to FFFFh
Set the home position multiple revolution data.
(Only using with the absolute position detection
system.)
Each axis
024E *CY0L Home
position
within 1
revolution
position
(lower)
0000h pulse 0000h
to FFFFh
Set the within 1 revolution home position.
(Only using with the absolute position detection
system.)
Each axis
024F *CY0H Home
position
within 1
revolution
position
(upper)
0000h 0000h
to FFFFh