

















8 - 16
8. TANDEM DRIVE
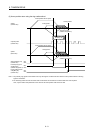
(6) Home position return using a scale home position signal detection method
Home position return is performed using a home position signal (Z-phase) on a linear scale. After detecting
the proximity dog, move in the direction of the home position and in the opposite direction and the position
where a home position signal is detected is defined to be the home position. When using scale home
position signal detection home position return for tandem drive axes, designate adjustment mode or normal
mode using tandem drive options (parameter No.0265).
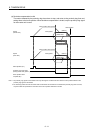
(a) Adjustment mode
1) Summary
Adjustment mode is used during mechanical adjustment, and is used to calculate the home position
signal offset (amount of deviation in the position of the home position signal for the master axis and
slave axis) on a linear scale.
When executing home position return while in adjustment mode, after detecting the master axis home
position signal and the slave axis home position signal while returning to home position, the axes are
moved to the home position signal of the master axis. At this time the amount of offset from the
position where the master home position signal was detected to the position where the slave home
position was detected is calculated and output using the tandem drive home position signal offset
(parameter No.026C, 026D). This amount of offset is used when compensating the amount of
deviation between the master axis and slave axis when returning to home position; therefore, after
completing home position return save this offset on the user program.
POINT
Prior to returning to home position, set the axis linking the master axis and
slave axis mechanically at a right angle to the movement direction. If it is not
at a right angle, the home position signal position offset amount can not be
correctly calculated.