

















8 - 9
8. TANDEM DRIVE
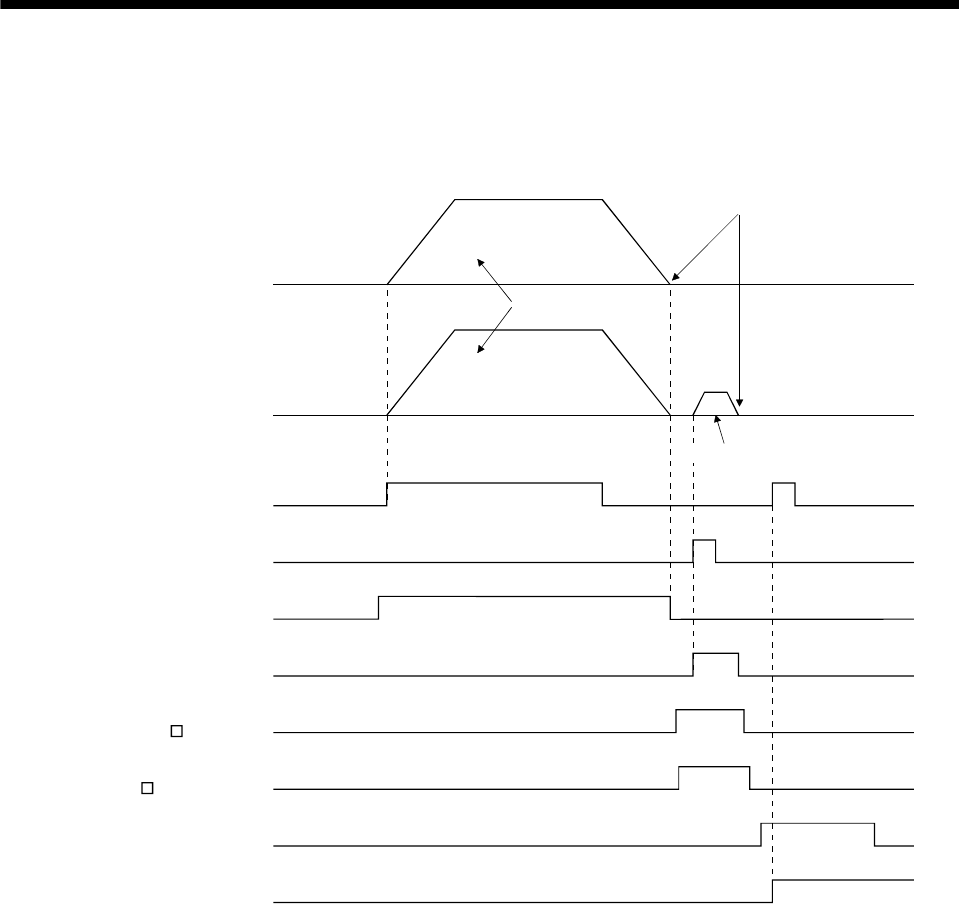
(3) Home position return using a data set method
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Synchronous
operation
Home position
Balance-adjustment
P
MO
PS1
P
M1
PS2 PS3
The positions of the master axis:
P
M1 and slave axis: PS3 become the
home position for each axis
Master axis
Slave axis
Start operation (ST)
(master axis)
Start operation (ST)
(slave axis)
JOG mode (JOG)
(master axis)
Incremental mode (S)
(slave axis)
Non-synchronous
command (ASYN )
In non-synchronous
mode (ASYO )
Home position return
mode (ZRN) (master axis)
Home position return
complete (ZP)
(master axis)
Note. This explanation is an example for using JOG operation for moving to home position.