



















App. - 12
APPENDIX
3) Servo information (2)
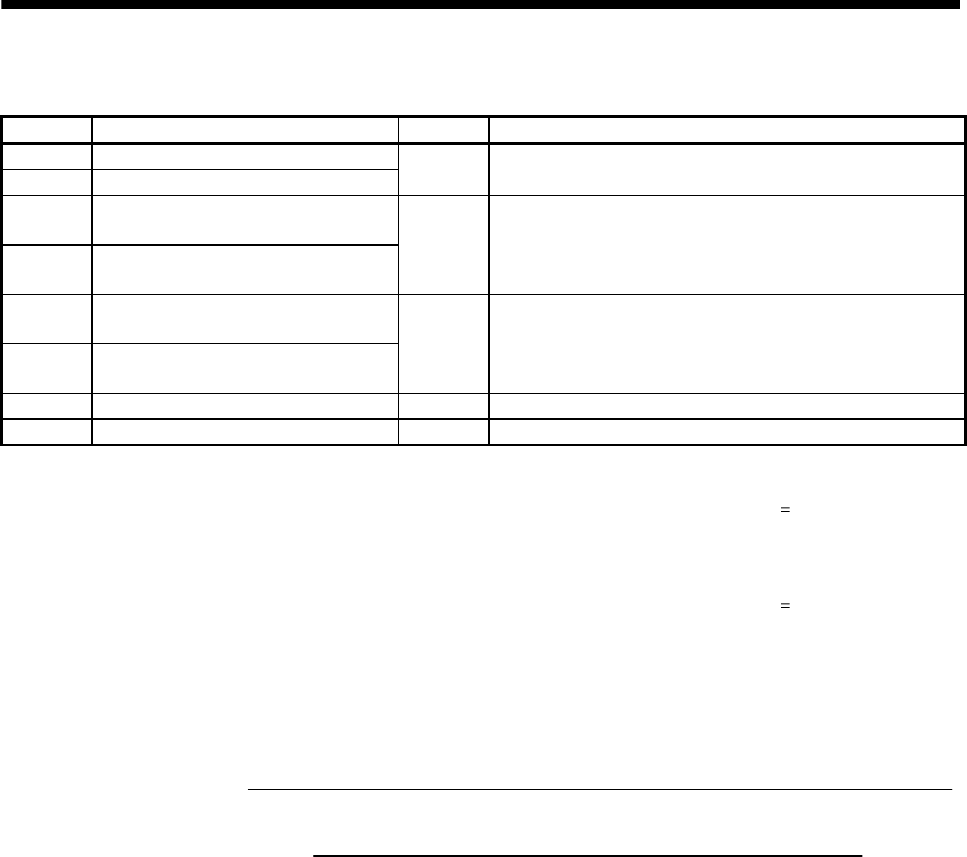
Monitor No. Description Unit Description
0208 Speed feedback (lower) 0.01mm/s Displays motor speed in units of 0.01mm/s.
0209 Speed feedback (upper)
020E Detector within 1 revolution position
(lower)
pulse Displays the current position within one-revolution. (Note 1)
020F Detector within 1 revolution position
(upper)
0210 Home position within 1 revolution
position (lower)
pulse Displays the home position within one-revolution. (Note 1)
0211 Home position within 1 revolution
position (upper)
0214 Multiple revolution counter rev Displays the current multiple revolution counter. (Note 2)
0215 Home position multiple revolution data rev Displays the home position multi-revolution data. (Note 2)
Note. 1. Incremental linear encoder
Absolute position linear encoder
2. Incremental linear encoder
Absolute position linear encoder
:
:
:
:
Setting the position at the time of power on as 0, the position normalized by the stop
interval during home position.
Setting the linear encoder home position (absolute position data
0), the position
normalized by the stop interval during home position.
Setting the position at the time of power on as 0, the counter that counts up or down by
the stop interval during home position return.
Setting the linear encoder home position (absolute position data
0), the counter that
counts up or down by the stop interval during home position return.
(e) Command units
When using speed control mode in interface mode, the conversion of data in units of 0.01r/min is
required. The formula for conversion is as follows.
Speed command [0.01r/min] =
Speed command[m/s]×1000×1000×60×100
Linear encoder resolution[μm/pulse]×Stop interval setting for home position return[pulse]
Linear encoder resolution [µm/pulse] =
Linear encoder resolution setting Numerator (Parameter No.1301)
Linear encoder resolution setting Denominator (Parameter No.1302)]