



















5 - 27
5. OPERATIONAL FUNCTIONS
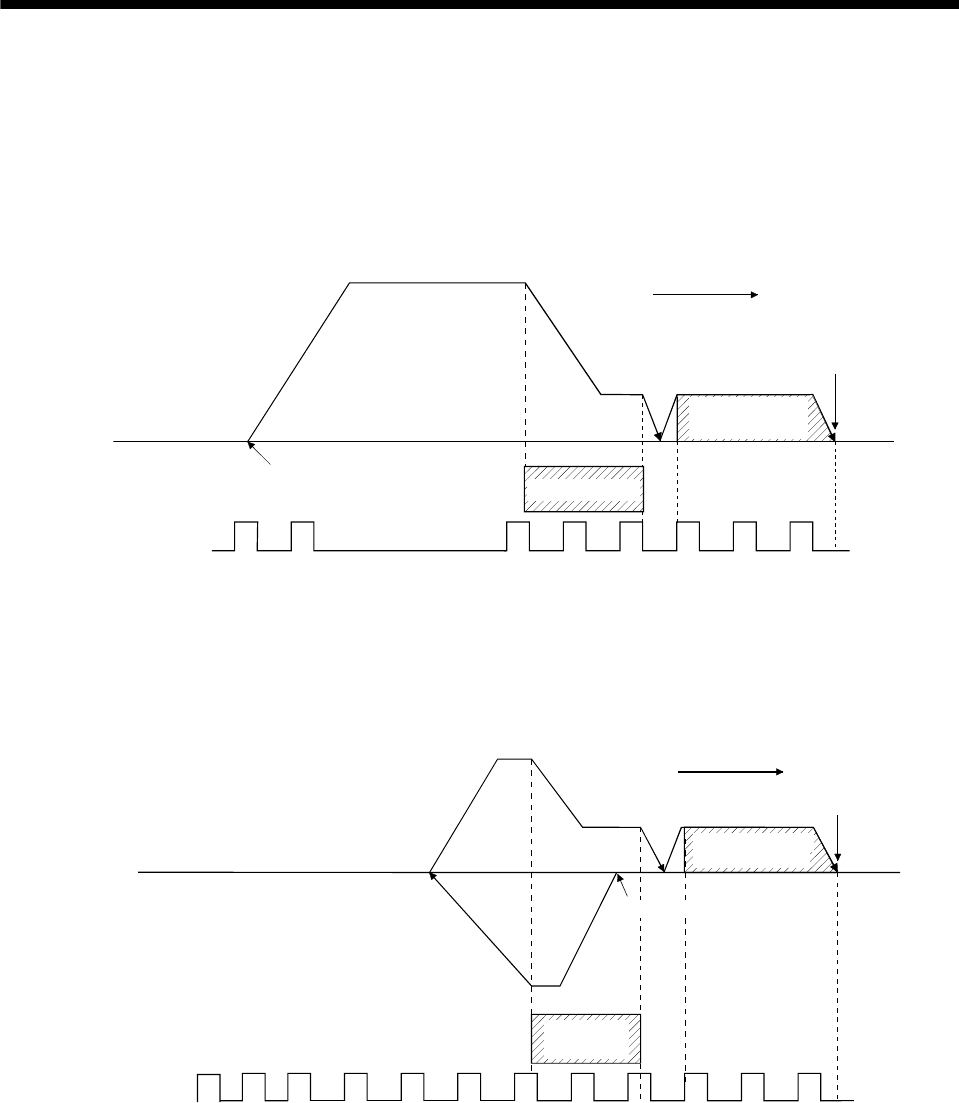
5.5.4 Home position return using a dog method
The deceleration is started at the front end of the dog, and the first Z-phase after passing the rear end of the
dog is defined as the home position.
(1) When there is a proximity dog in the direction of home position return
Amount of home
position shift
Home position
(Note 1, 2)
Creep speed
Proximity dog
Home position return direction
Home position return speed
Start operation
Speed
Z-phase pulse
(Note 3)
Note 1. The amount of home position offset is set to the amount of shift in the home position (parameter No.0248, 0249).
2. If the amount of shift in the home position is zero, the servo stops above the Z-phase.
3. The polarity of the proximity dog input signal can be changed using home position return option 1 (parameter
No.0240). (The above figure shows the case of the normally closed contact.)
(2) When the dog is on at start operation
Home position return direction
Amount of home
position shift
Home position
Creep speed
Home position return speed
Start operation
Proximity
dog
Z-phase pulse
Speed