



















4 - 7
4. SYSTEM STARTUP
4.5.2 System option 1 setting
SSCNET communication method and control cycle is set by System option 1 (parameter No.0001).
SSCNET communication method is used for communication between a position board and connected units
such as servo amplifiers and SSCNET
/H method is available.
Control cycle is a cycle in which the position board controls command import, position control, status output,
and communication with servo amplifier and 0.88ms, 0.44ms and 0.22ms are available.
Number of servo amplifier axes which a position board can control is shown below for each control cycle.
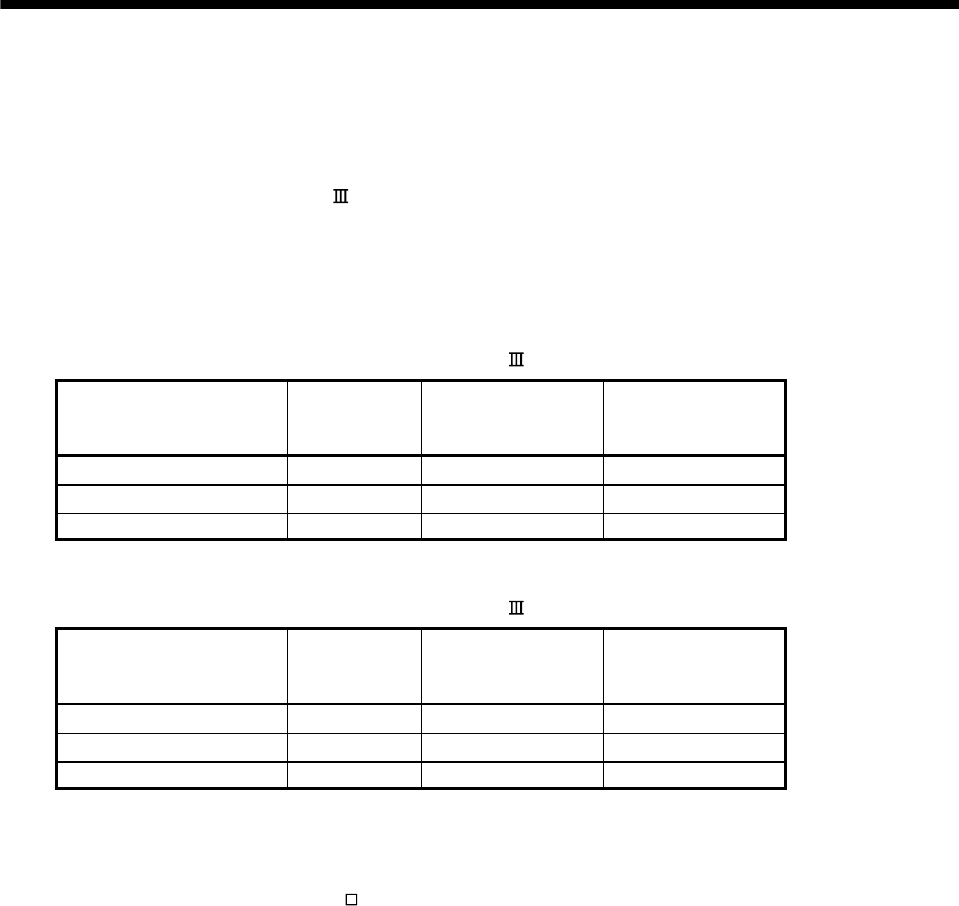
(1) For MR-MC210/MR-MC240
(a) When SSCNET communication method is SSCNET
/H
Control cycle
Max. No. of
axes connected
Max. No. of axes
connected for each
line
Controllable axis No.
0.88ms 20 axes 20 axes Axis 1 to 20
0.44ms 16 axes 16 axes Axis 1 to 16
0.22ms 8 axes 8 axes Axis 1 to 8
(2) For MR-MC211/MR-MC241
(a) When SSCNET communication method is SSCNET
/H
Control cycle
Max. No. of
axes connected
Max. No. of axes
connected for each
line
Controllable axis No.
0.88ms 32 axes 20 axes Axis 1 to 32
0.44ms 16 axes 16 axes Axis 1 to 16
0.22ms 8 axes 8 axes Axis 1 to 8
Note 1. Do not connect more servo amplifiers than the max. No. of axes connected. When more servo
amplifiers are connected than the max. No. of axes connected, system setting error
(alarm No. 38, detail 01) will occur.
2. Use servo amplifier software version A3 or later when the control cycle is 0.22ms, and the
3-axis servo amplifier MR-J4W3-
B is used.