



















8 - 32
8. TANDEM DRIVE
8.9 Tandem drive axis servo alarms
If an alarm occurs on the master axis or slave axis, dynamic braking and stoppage is implemented for the axis
for which the servo alarm did not occur as well. When the cause for an alarm on an axis is cancelled such as
through a servo alarm reset, the dynamic brake is cancelled.
This is the same for a servo forced stop warning (E6) or a main circuit off warning (E9) status on either the
master axis or the slave axis.
This operation does not exist in drive modes (synchronous mode/non-synchronous micro adjustment mode).
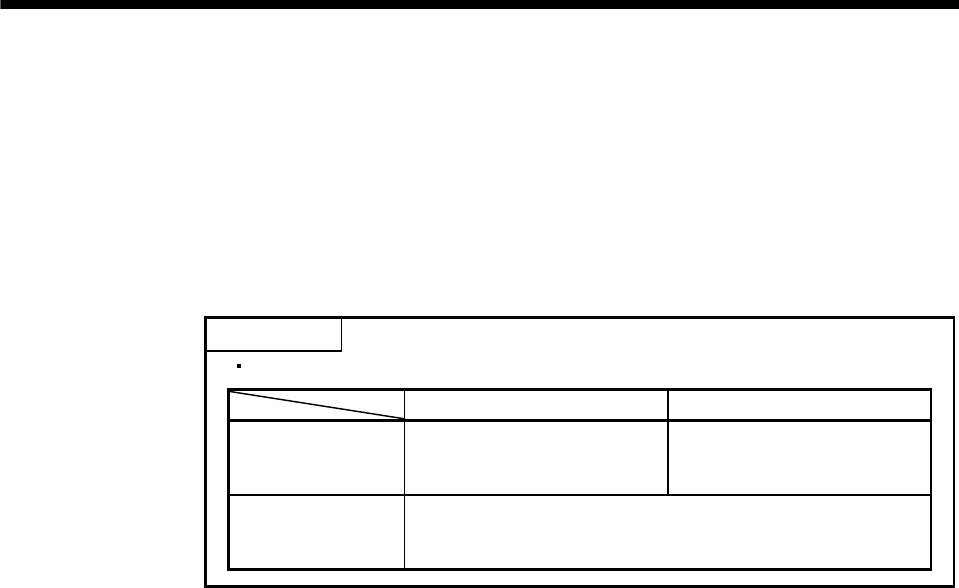
POINT
Relationship between servo on/off and dynamic brake on/off
While Servo On command is ON While Servo On command is OFF
Dynamic brake off
Servo control is operating
(Positioning can be controlled.)
Servo is coasting
(Is easily turned using an external
force.)
Dynamic brake on
Dynamic brake status
(If an external force is placed to try and rotate axis, dynamic brake
resists the force.)
8.10 Deviation monitoring function
A function where if the deviation between the master axis and the slave axis exceeds the tandem drive
excessive deviation width (parameter No.0268) during synchronous mode while in tandem drive axis mode, the
tandem drive excessive deviation (operation alarm 53, detail 01) occurs and both axes are stopped using a
dynamic brake. When the setting for the excessive deviation width is set to 0, it becomes invalid.