



















9 - 20
9. INTERFACE MODE
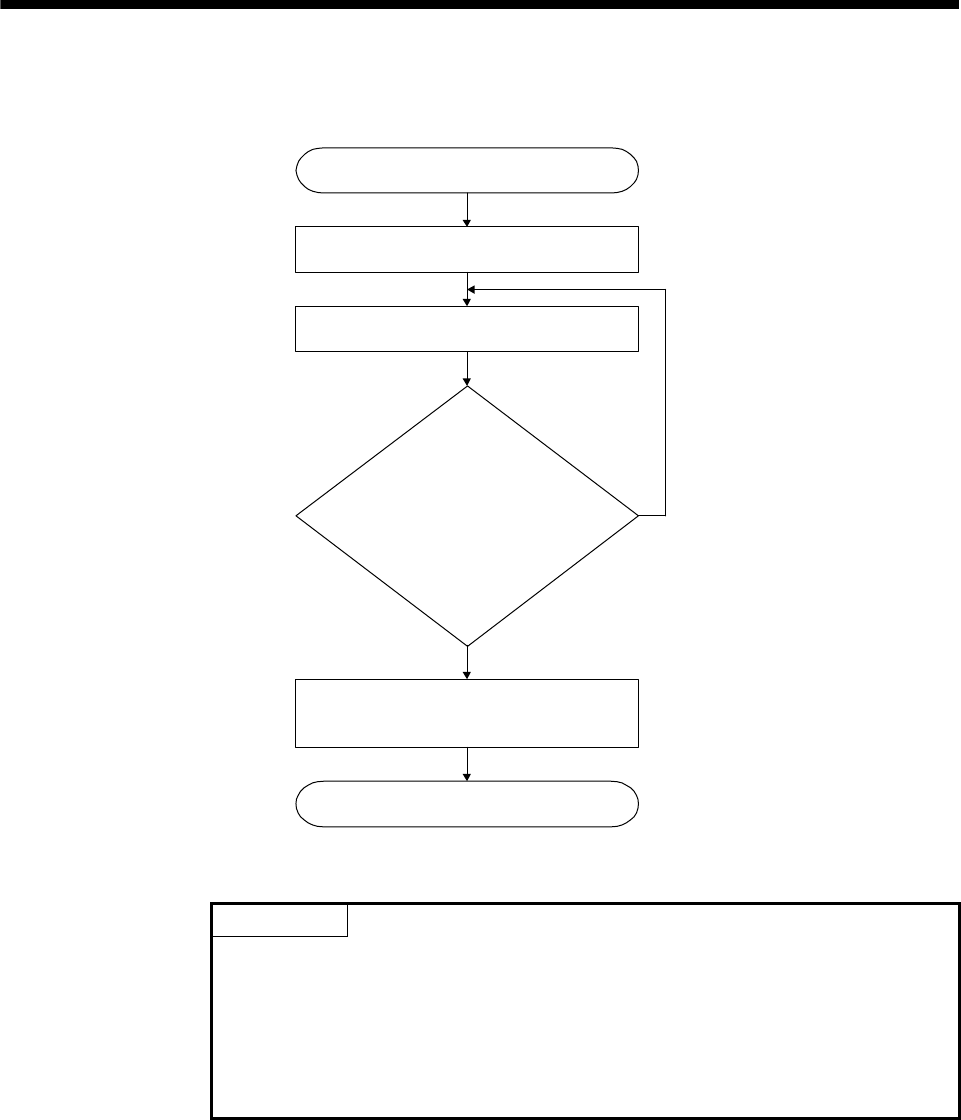
(1) Procedure for updating position command data
The procedure for updating position command data when interrupt output is invalid is shown below.
Get latest position command buffer number
(sscCheckLatestBuffer)
Start
Get transmit position command buffer number
(sscCheckTransmitBuffer)
Yes
No
Store the position command data in the latest
position command buffer
(sscIfmRenewLatestBufferEx)
(Transmit position
command buffer number=
latest position command buffer+1)
or ((Transmit position command buffer
number=0) and (latest position command
buffer=maximum position
command buffer number))?
End
POINT
• During servo off always perform a follow up (store current feedback position to
the latest position command buffer). Immediately after servo on, the motor
may operate at a very high speed.
• When servo ready (RDY) switches from ON to OFF due to an alarm factor
etc., turn servo on (SON) OFF. After removing the cause, an unexpected
operation may occur.