


















6 - 1
6
6. APPLICATION FUNCTIONS
6. APPLICATION FUNCTIONS
6.1 Command units
6.1.1 Position command unit - electronic gear
Set position command (such as position data of point table and the incremental movement amount) by position
command unit. Electronic gears (parameter No.020A, 020B, 020C, 020D) are used to adjust position
command unit. Through making changes to the electronic gears, it is possible to move the equipment using an
arbitrary multiplication constant for the movement amount.
Electronic gear =
Electronic gear numerator (CMX)
Electronic gear denomnator (CDV)
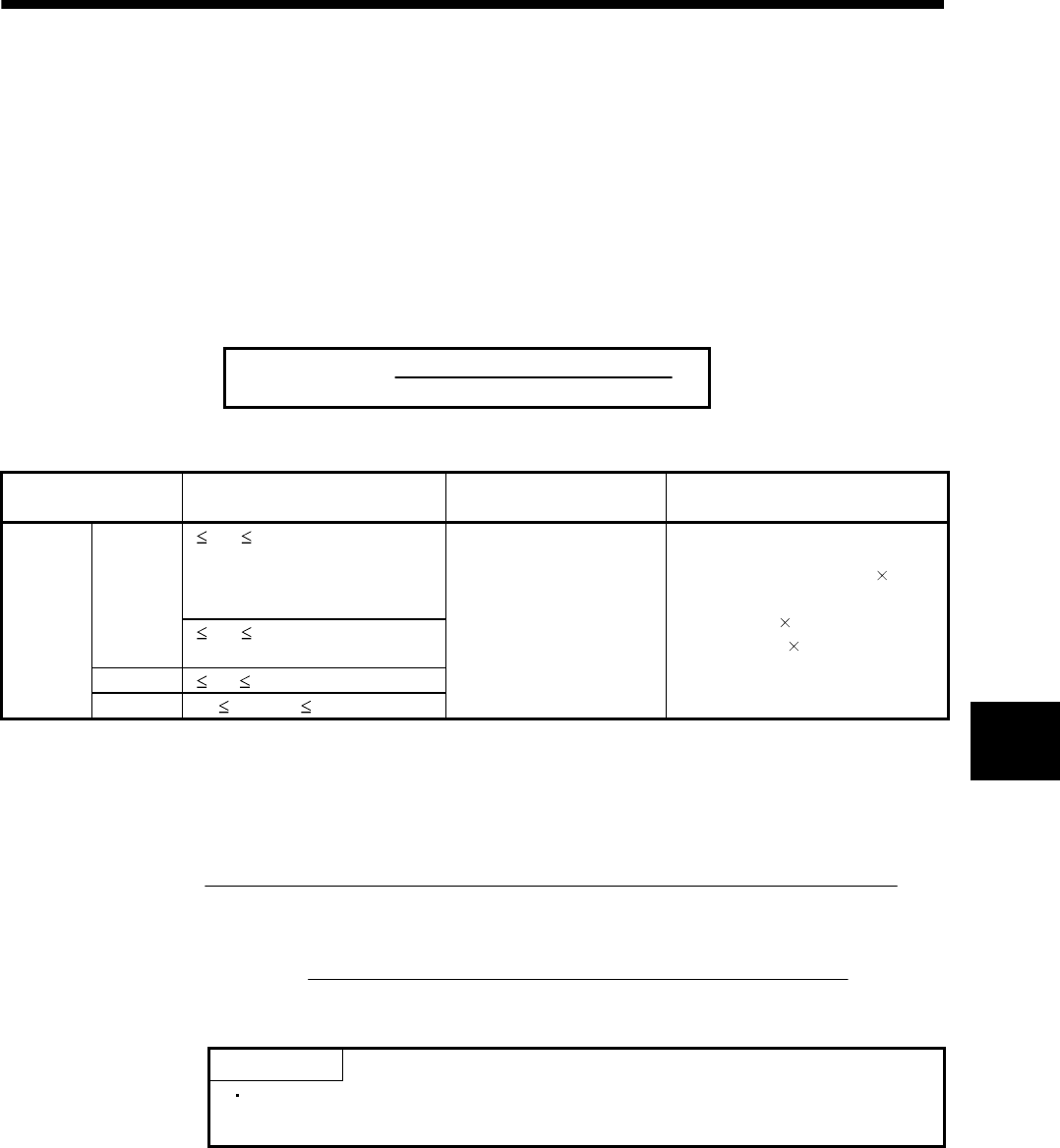
The number of encoder pulses per revolution is 4194304 or less (normal servo motor, linear servo motor etc.).
Item Setting range
Number of encoder pulses
per revolution [pulse] (Note 1)
Maximum speed [r/min] (Note 2,3)
Electronic
gear
CMX
1
CMX 5242879
(When the speed unit is position
command unit/s or position
command unit/min)
To 67108864
(The resolution of up to 26 bit
is supported.)
Limits the speed to 2160000
(262144/number of encoder pulses
per revolution)
(CMX/CDV) or less,
and to 4893355
(262144/number of
encoder pulses per revolution) or less
1 CMX 477218
(When the speed unit is r/min)
CDV 1 CDV 589823
CMX/CDV 1/16 CMX/CDV 100000
Note 1. When a linear servo motor is used, this becomes the value which is set in "Stop interval setting for home position return" of the
linear/direct drive motor function selection 1 (parameter No.1300).
2. When the command speed output to the servo amplifier from the position board exceeds the motor maximum revolution speed,
the speed is limited to the motor maximum revolution speed (monitor No.0114).
3. When a linear servo motor is used, this is converted into maximum speed [r/min] by the following formula.
Maximum speed [r/min] =
Motor maximum speed[m/s]×1000×1000×60
Linear encoder resolution[μm/pulse]×Stop interval setting for home position return[pulse]
However,
Linear encoder resolution [µm/pulse] =
Linear encoder resolution setting Numerator (Parameter No.1301)
Linear encoder resolution setting Denominator (Parameter No.1302)]
API LIBRARY
Use the sscChange2Parameter/sscCheck2Parameter functions to set/get
electronic gear.