



















13 - 9
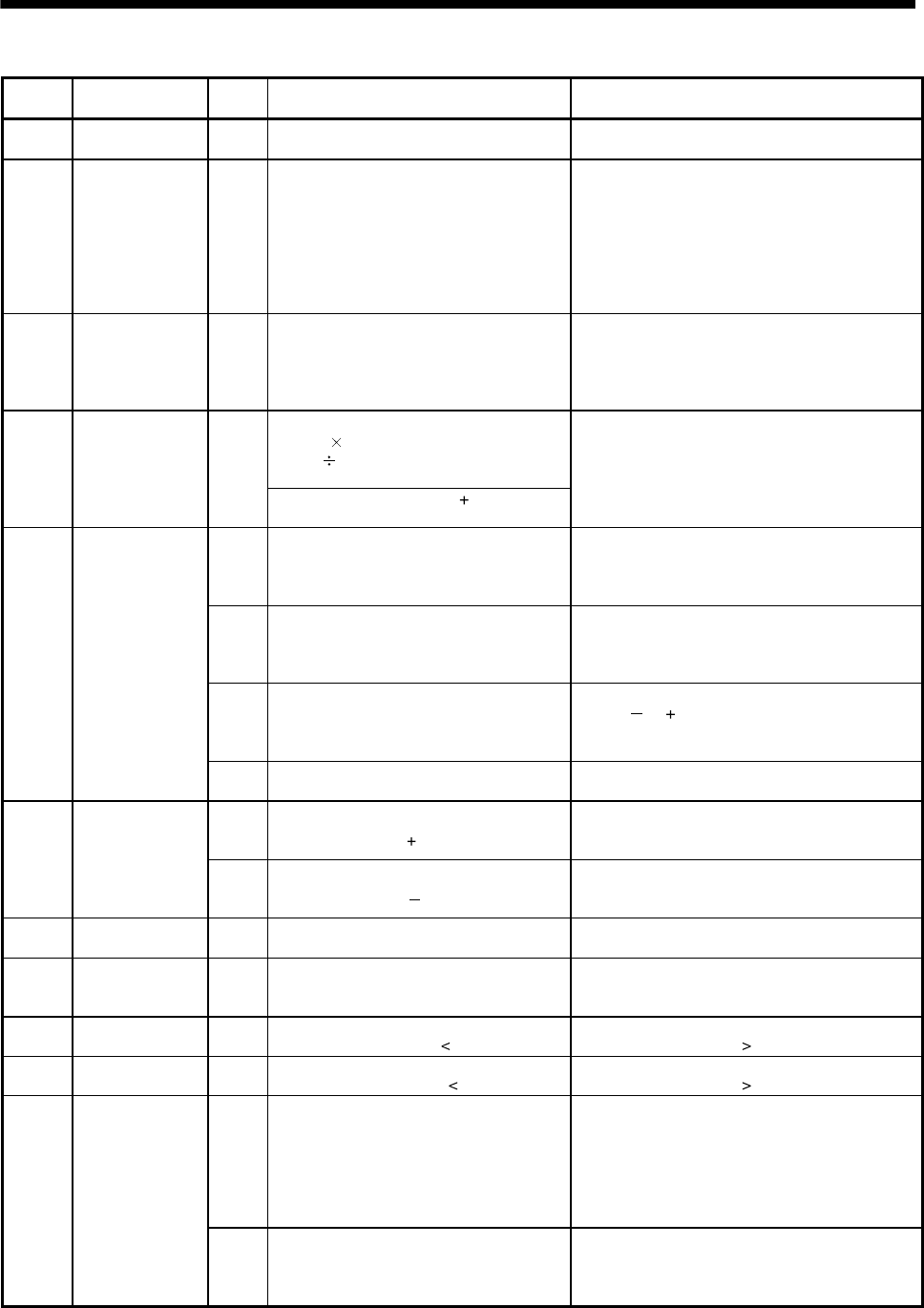
13. ALARM NUMBER
Alarm
No.
Content
Detail
No.
Cause of occurrence Procedure
96
Home position
setting error
01
Home position setting was performed prior
to motor being stabilized.
Adjust the servo so that it stabilizes quickly upon
stopping at the home position.
97
Home position
stop error
01
Upon stopping at home position, even after
1800 ms passed, in-position was not
achieved.
(1) Reduce home position return speed and creep
speed.
(2) Lengthen the home position return time
constant.
(3) Broaden the in-position boundaries.
(4) Confirm that it is not contacting the machine
when return to home position is being
performed.
98
Home position
search limit error
01
The movement amount moved to detect
the home position signal or dog signal
while performing return to home position
exceeded the home position search limit
(parameter No.024A, 024B)
Confirm the input status of the dog signal etc.
9C
Z-phase mask
amount setting
error
01
The value calculated by Z-phase mask
amount
electronic gear numerator
(CMX)
electronic gear denominator
(CDV) exceeds 32 bits.
Reexamine the setting value of the Z-phase mask
amount.
The Z-phase mask amount the travel
distance to the Z-phase exceeds 32 bits.
9D
Home position
return parameter
setting error
01
For a home position return method that
requires the Z-phase being passed, "Not
need to pass motor Z phase after the
power supply is switched on" is set.
Reexamine the home position return method
(parameter No.0240) or the home position setting
condition selection (parameter No.1190).
02
In the Z-phase detection method home
position return, "Search again" is set in the
setting of the home position signal re-
search.
Set "Do not search again" to the home position
signal re-search (parameter No.0240).
03
In the home position return using other
than a Z-phase detection method, a
shortcut direction is set as the home
position return direction.
Set the
or direction to the home position
return direction (parameter No.0240).
04
The setting for home position return
method (parameter No.0240) is incorrect.
Reexamine the setting of home position return
method (parameter No.0240).
A0 Limit switch
01
The upper limit switch (LSP) turned off
while moving in the
direction.
Using JOG operation etc. move in the opposite
direction to return to within the limit switch
boundaries.
02
The lower limit switch (LSN) turned off
while moving in the
direction.
Using JOG operation etc. move in the opposite
direction to return to within the limit switch
boundaries.
A1
Out of software
limit boundaries
01
Position outside of software limit
boundaries is being designated.
Set the movement command to within the
software limit boundaries.
A2
Reached software
limit
01 The software limit has been reached.
Using JOG operation etc. move in the opposite
direction to return to within the software limit
boundaries.
A4
Software limit
Parameter error
01
The parameter settings for the software
limits has the upper limit
lower limit.
Set the parameter settings for the software limits
such that the upper limit lower limit.
A5
Position switch
parameter error
01
The parameter settings for the position
switch has the upper limit
lower limit.
Set the parameter settings for the position switch
such that the upper limit lower limit.
A6
Mark detection
write/read error
01
During mark detection, it is not possible to
write to the target buffer.
The reading speed of the host controller for a
mark detection occurrence is too slow. Perform
the following.
(1) Increase the number of continuous latch data
storages (parameter No.02B0, No.02B2) for
the applicable mark sensor.
(2) Increase the reading speed.
02
After the input of a value to the read
complete buffer number that exceeds the
mark detection count, a mark sensor was
detected.
Reexamine the input value for the read complete
buffer number.