



















9 - 29
9. INTERFACE MODE
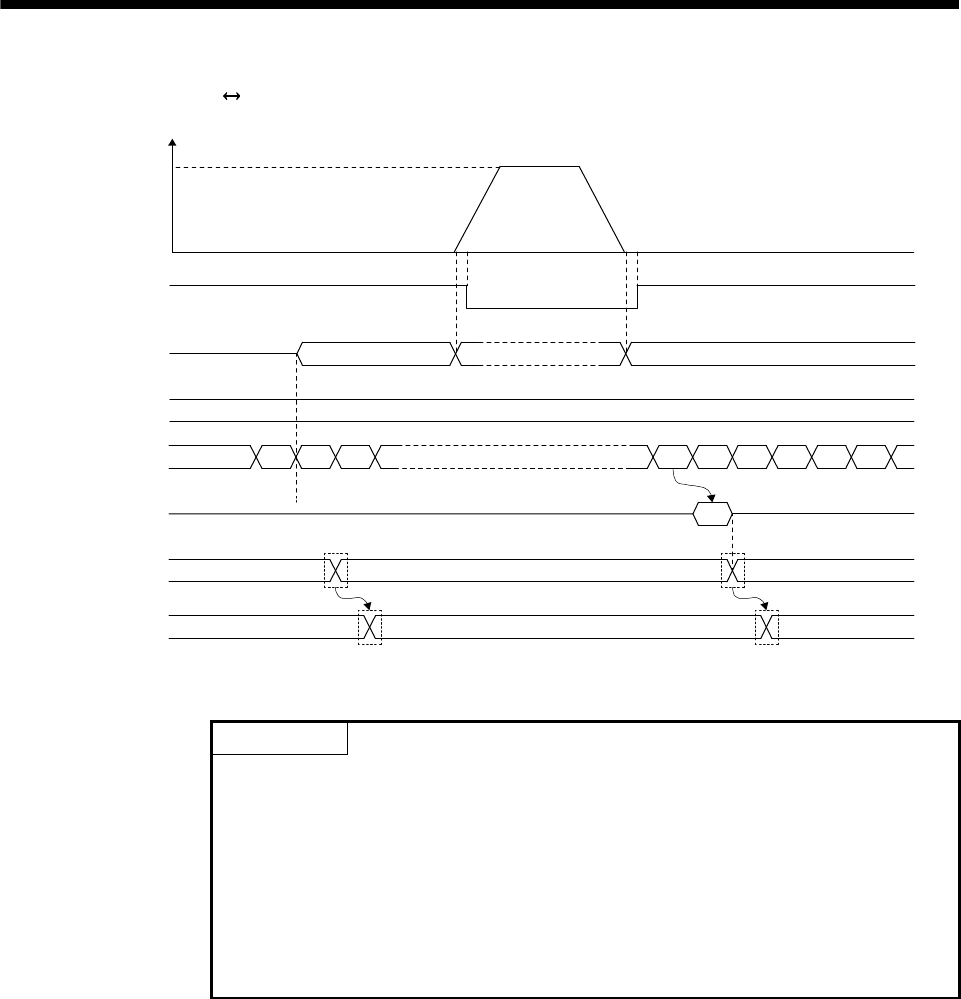
(2) Position control mode
torque control mode
30.0%
Torque
20000
Torque control
speed limit value
sscsscIfmTrqSetSpeedLimit function
Current feedback
position
Control mode
command
0002h: Torque control 0000h: Position control0000h: Position control
0002h: Torque control 0000h: Position control0000h: Position control
Control mode
status
Position command
data
sscIfmSetControlMode function
sscIfmSetControlMode function
sscIfmSetControlMode
function
sscIfmSetControlMode
function
sscIfmRenewLatestBufferEx
function
Torque command
data
0
Zero speed (ZSP)
0...300...0 0
sscIfmRenewLatestBufferEx function
POINT
• Set the torque control speed limit value before switching control modes.
• When returning to position control mode, switch control modes after checking
that zero speed (ZSP) is turned ON. If control mode is switched while zero
speed (ZSP) is OFF, control mode switch error (operation alarm 2E, detail
No.01) occurs.
• When switching to position control mode and the travel amount at follow up
exceeds 20000000, set position command data to the position command
buffer to ensure that the travel amount per cycle is 20000000 or less.