



















9 - 34
9. INTERFACE MODE
9.9 Home position return
When startup is performed in interface mode, the operational function home position return cannot be used.
Therefore, for an absolute position detection system, use the following method to perform a home position
return. For an incremental system, home position set is not necessary. (The position at power supply ON is
treated as 0).
1) Update the position command buffer and move to the home position.
2) Check that the in-position signal (INP) is on.
3) Turn ON the home position set command (ZSC).
4) Check that home position set complete (ZSF) turns ON.
5) Read the home position multiple revolution data (parameter 024D), and home position within 1
revolution position (parameter 024F), and save to the user program.
6) The next time power supply is ON, set the parameters read in 5)
7) The position board will restore the absolute position based on the parameters above.
When home position return is performed by this function, coordinate systems such as the current command
position and current feedback position are in the same state before home position return and do not change
until the power supply is turned OFF/ON again. Therefore after home position return, perform a home position
offset for position commands at home position return as shown in the formula below.
Position command = Machinery command position + Home position offset
• Position command : Position provided to the position board. (pulse)
• Machinery command position : The actual position to move the machine to. (pulse)
• Home position offset : The difference between machinery command position and position
command. (pulse)
When the home position coordinates are set by parameters, the absolute position is restored so that the place
of set home position is the same as the home position coordinates.
When the home position set command turns on during in-position signal (INP) off, home position set error
(ZSE) turns on, and home position return is not completed.
Also, when position command exceeds 32 bit or motor exceeds ±32767 revolutions when moving from the
home position in an absolute position detection system, the current command position cannot be normally
restored at power supply on. Use absolute position detection system within ±32767 revolutions and with
position commands within 32 bit.
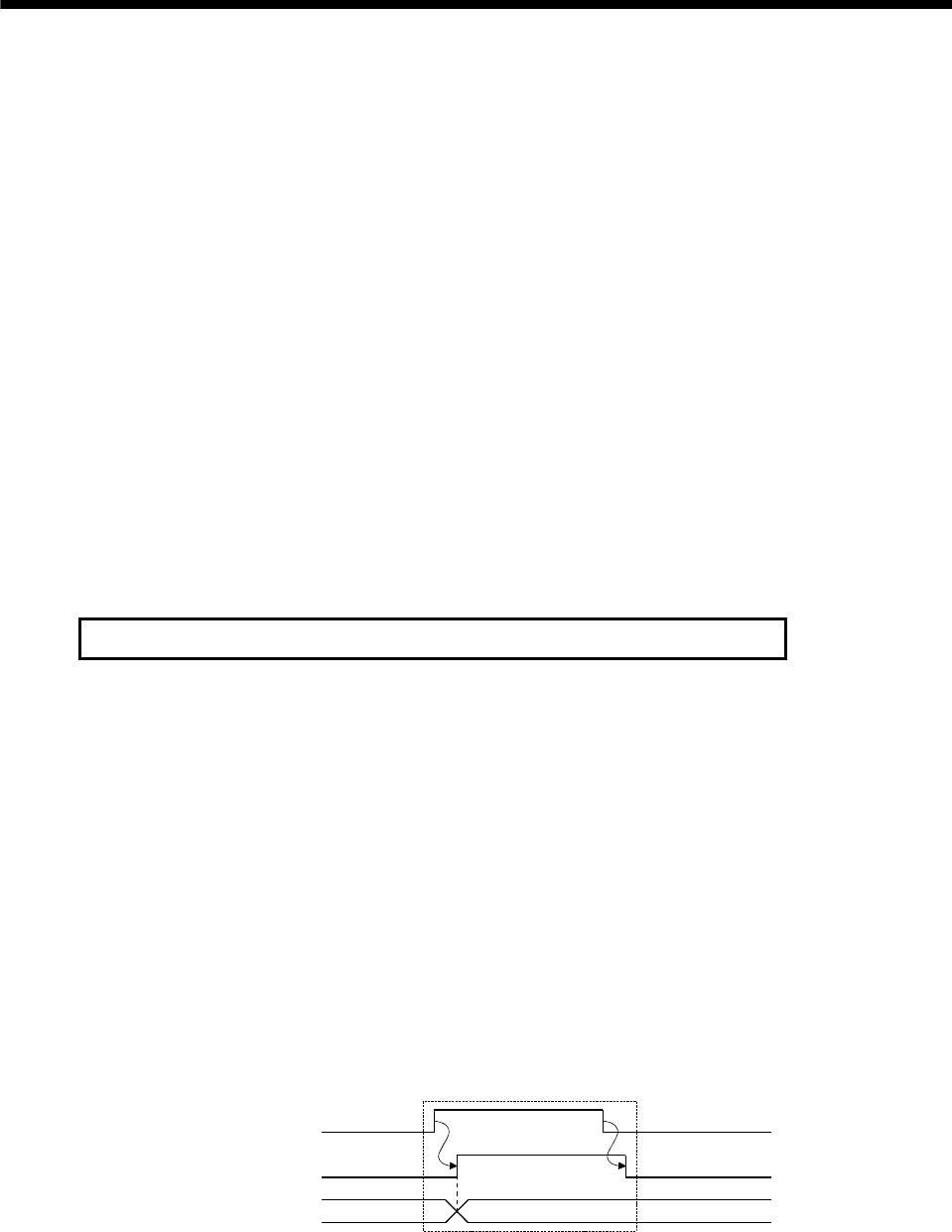
sscIfmSetHomePosition function
Home position data
(parameter)
Home position set
command
Home position set
complete