



















8259A
INTERRUPTS
IN
MICROCOMPUTER
SYSTEMS
Microcomputer system design requires that 1/0 devices
such
as
keyboards, displays, sensors
and
other com-
ponents receive servicing in
an
efficient manner
so
that
large amounts
of
the total system tasks
can
be
assumed
by the microcomputer with
little or no effect on through-
put.
The
most common method
of
servicing such devices is
the
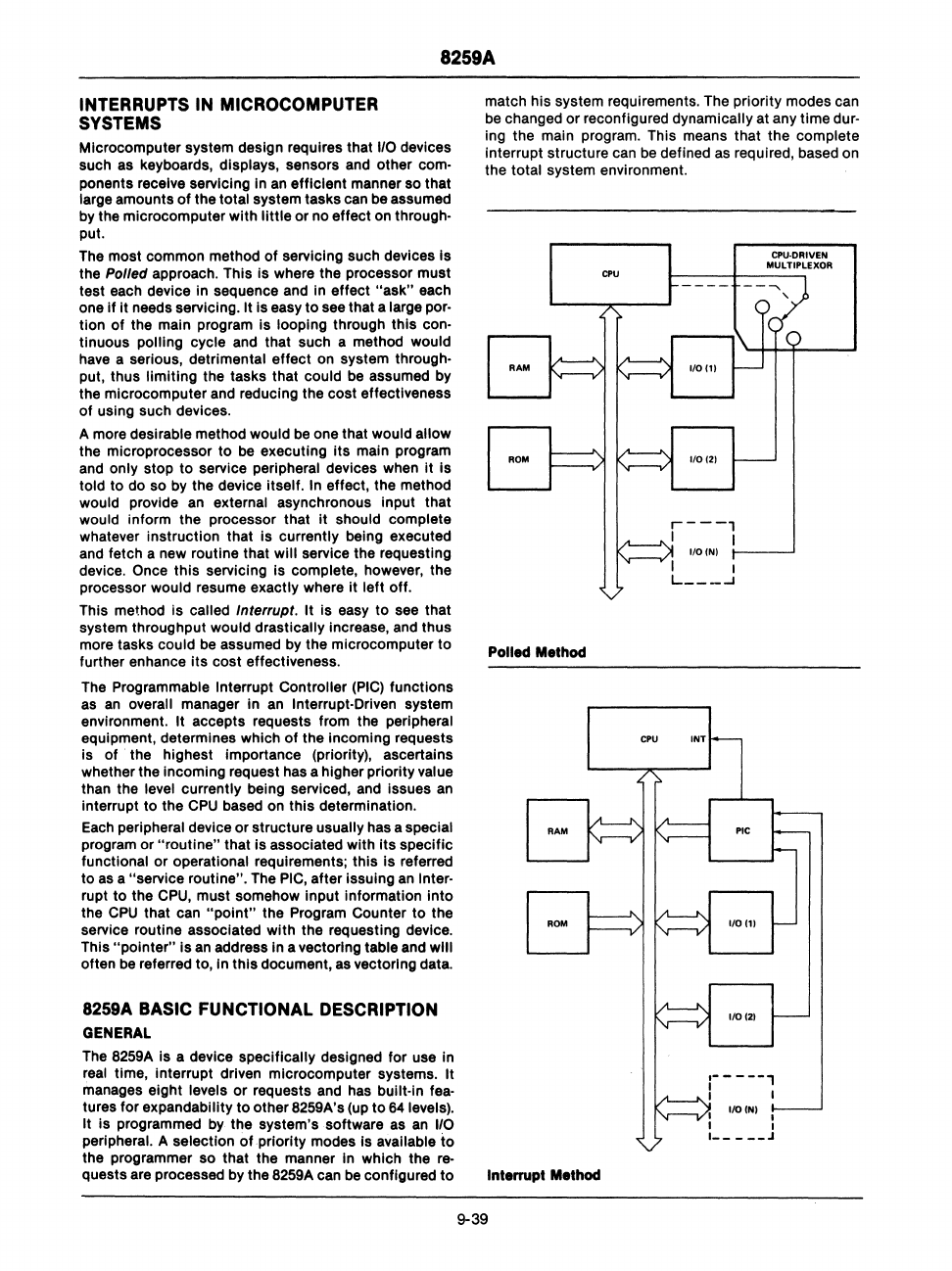
Polled approach. This is where the processor must
test
each
device in sequence and in effect "ask" each
one
if
it needs servicing. It is easy to see that a large por-
tion of the main program is
looping through this con-
tinuous
polling cycle and that such a method would
have
a serious, detrimental effect
on
system through-
put, thus
limiting the tasks that could
be
assumed
by
the microcomputer
and
reducing the cost effectiveness
of using such devices.
A more
desirable method would
be
one that would allow
the microprocessor to
be
executing
its
main program
and
only stop to service peripheral devices when
it
is
told to do so
by
the device itself. In effect, the method
would provide
an
external asynchronous input that
would inform the processor that
it
should complete
whatever instruction that is currently being executed
and
fetch a
new
routine that will service the requesting
device.
Once this servicing is complete, however, the
processor
would resume exactly where it left off.
This
method is called Interrupt. It is easy to
see
that
system throughput
would drastically increase,
and
thus
more tasks
could
be
assumed
by
the microcomputer to
further enhance its cost effectiveness.
The
Programmable Interrupt Controller
(PIC)
functions
as
an
overall manager in
an
Interrupt-Driven system
environment.
It accepts requests from the peripheral
equipment, determines which of the incoming requests
is
of·
the highest importance (priority), ascertains
whether the incoming request
has
a higher priority value
than the level currently being serviced,
and
issues
an
interrupt to the
CPU
based on this determination.
Each
peripheral device or structure usually has a special
program or "routine" that Is associated with its specific
functional or operational requirements; this
Is
referred
to
as
a "service routine". The
PIC,
after issuing
an
Inter-
rupt to the
CPU,
must somehow input information into
the
CPU
that can
"point"
the Program Counter to the
service routine associated with the requesting device.
This
"pointer" is
an
address
In
a vectoring table and will
often
be
referred to, In this document,
as
vectoring data.
8259A
BASIC
FUNCTIONAL
DESCRIPTION
GENERAL
The
8259A
Is a device specifically designed for use in
real
time, Interrupt driven microcomputer systems. It
Manages
eight levels or requests
and
has
built-In
fea-
tures for expandabillty to other 8259A's
(up
to
64
levels).
It
is programmed by the system's ·software
as
an
1/0
peripheral. A selection
of
priority modes
Is
available to
the programmer so that the manner In which the
re-
quests
are
processed by the
8259A
can
be
configured to
match his system requirements. The priority modes
can
be
changed or reconfigured dynamically at any time dur-
ing the main program. This means that the
complete
interrupt structure
can
be
defined
as
required, based on
the
total system environment.
RAM
ROM
Polled
Method
RAM
ROM
Interrupt
Method
9-39
CPU
CPU
INT
CPU·DRIVEN
MULTIPLEXOR