



















3 - 24
3. SIGNALS AND WIRING
3.5 Signal (device) explanations
For the I/O interfaces (symbols in I/O division column in the table), refer to section 3.7.2.
In the control mode field of the table
The pin No.s in the connector pin No. column are those in the initial status.
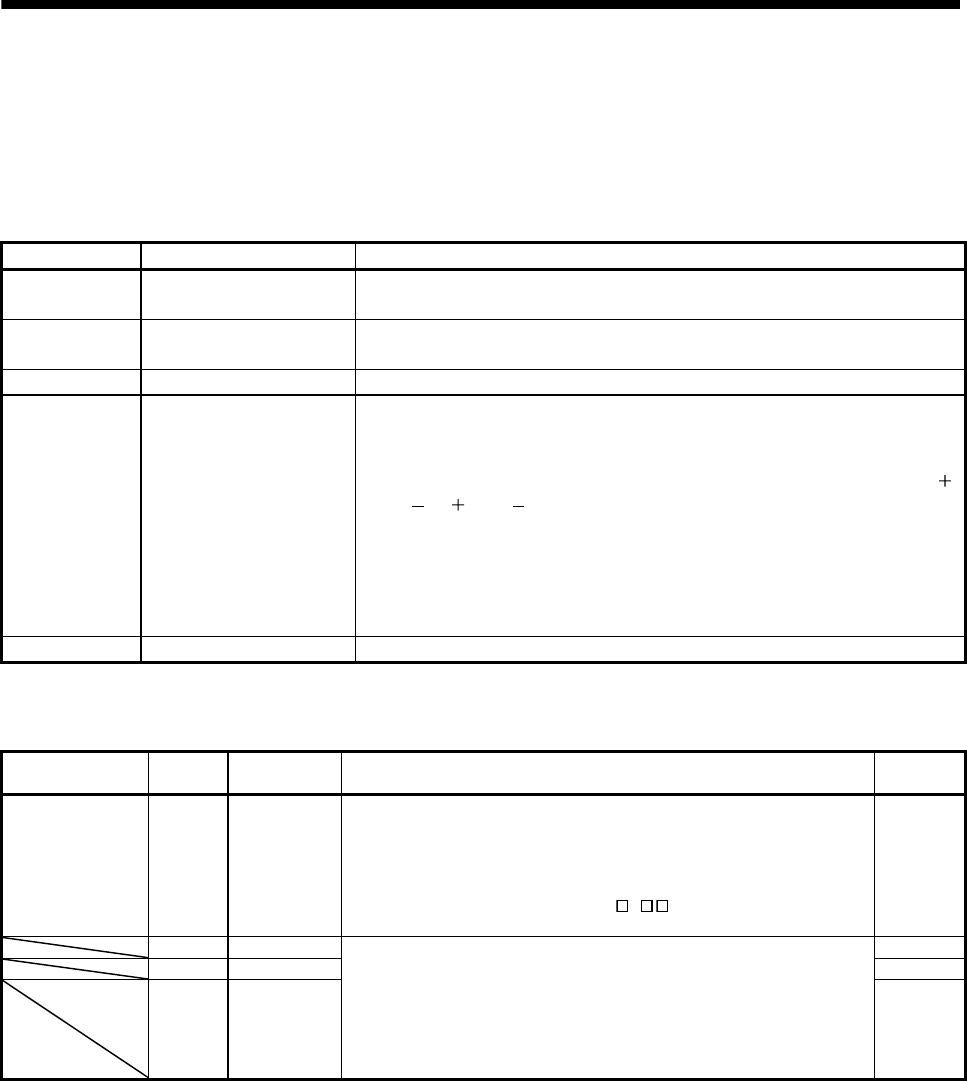
(1) Connector applications
Connector Name Function/Application
CN1A Connector for bus cable
from preceding axis.
Used for connection with the controller or preceding-axis servo amplifier.
CN1B Connector for bus cable to
next axis
Used for connection with the next-axis servo amplifier or for connection of the cap.
CN2 Encoder connector Used for connection with the servo motor encoder.
CN4 Battery connection
connector
When using as absolute position detection system, connect to battery (MR-J3BAT).
Before installing a battery, turn off the main circuit power while keeping the control
circuit power on. Wait for 15 minutes or more (20 minutes or for drive unit 30kW or
more) until the charge lamp turns off. Then, confirm that the voltage between P(
)
and N(
) (L and L for drive unit 30kW or more) is safe with a voltage tester and
others. Otherwise, an electric shock may occur. In addition, always confirm from the
front of the servo amplifier whether the charge lamp is off or not. Replace the
battery with main circuit power OFF and with control circuit power ON. Replacing
the battery with the control circuit power OFF results in loosing absolute position
data.
CN5 Communication connector The personal computer is connected.
(2) I/O device
(a) Input device
Device Symbol
Connector
pin No.
Function/Application
I/O
division
Forced stop EM1 CN3-20 Turn EM1 off (open between commons) to bring the motor to an forced
stop state, in which the base circuit is shut off and the dynamic brake is
operated.
Turn EM1 on (short between commons) in the forced stop state to reset
that state.
When parameter No.PA.04 is set to "
1 ", automatically ON
(always ON) can be set inside.
DI-1
DI1 CN3-2 DI-1
DI2 CN3-12 DI-1
DI3 CN3-19
Devices can be assigned for DI1 DI2 DI3 with controller setting.
For devices that can be assigned, refer to the controller instruction
manual. The following devices can be assigned for Q172HCPU
Q173HCPU QD75MH.
DI1: upper stroke limit (FLS)
DI2: lower stroke limit (RLS)
DI3: proximity dog (DOG)
DI-1