



















11 - 57
11. OPTIONS AND AUXILIARY EQUIPMENT
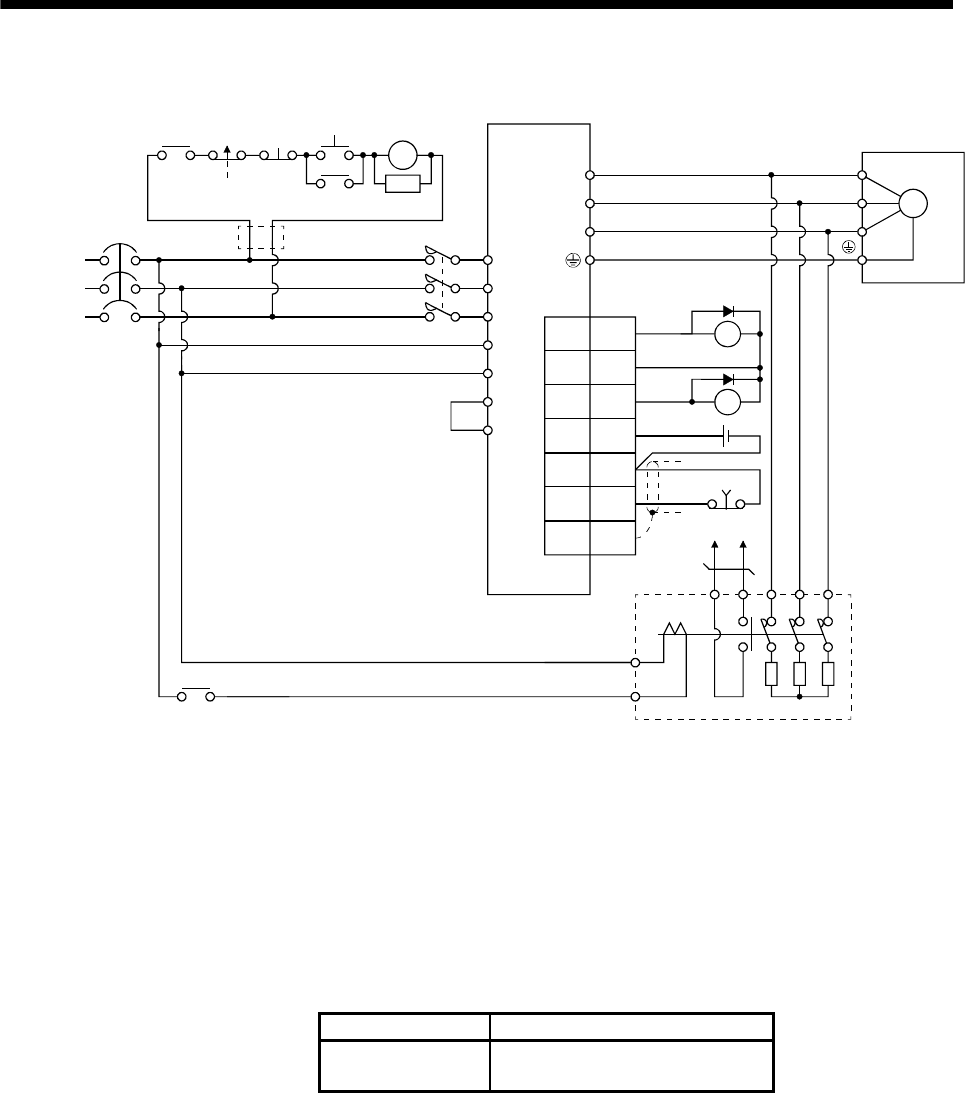
(2) Connection example
NFB
L11
L21
U
V
W
U
V
W
M
Servo amplifier
Servo motor
RA2
MC
SK
MC
ON
OFF
ALM
RA1
Operation-ready
EM1
L
3
L
2
L
1
(Note 5)
Power
supply
13 U14 V W
External dynamic brake
a
b
(Note 1)
P
P
1
(Note 2)
(Note 4)
EM1
3
20
SDPlate
DICOM
10
DB
(Note 3)
DOCOM
5
DICOM
ALM15
CN3
RA1
RA2
MC
(Note 6)
Note 1. Terminals 13, 14 are normally open contact outputs. If the dynamic brake is seized, terminals 13, 14 will open.
Therefore, configure up an external sequence to prevent servo-on.
2. For the servo amplifiers from 11k to 22kW, be sure to connect P
1 and P. (Factory-wired)
When using the power factor DC reactor, refer to section 11.13.
3. Assign the dynamic brake interlock (DB) in the parameters No.PD07 to PD09.
4. Stepdown transformer is required for coil voltage of magnetic contactor more than 200V class in 400V class servo amplifiers.
5. Refer to section 1.3 for the power supply specification.
6. The power supply voltage of the inside magnet contactor for 400V class dynamic brake DBU-11K-4 and DBU-22K-4 is restricted
as follows. When using these dynamic brakes, use them within the range of the power supply.
Dynamic brake Power supply voltage
DBU-11K-4
DBU-22K-4
1-phase 380 to 463VAC 50Hz/60Hz