


















5 - 23
5. PARAMETERS
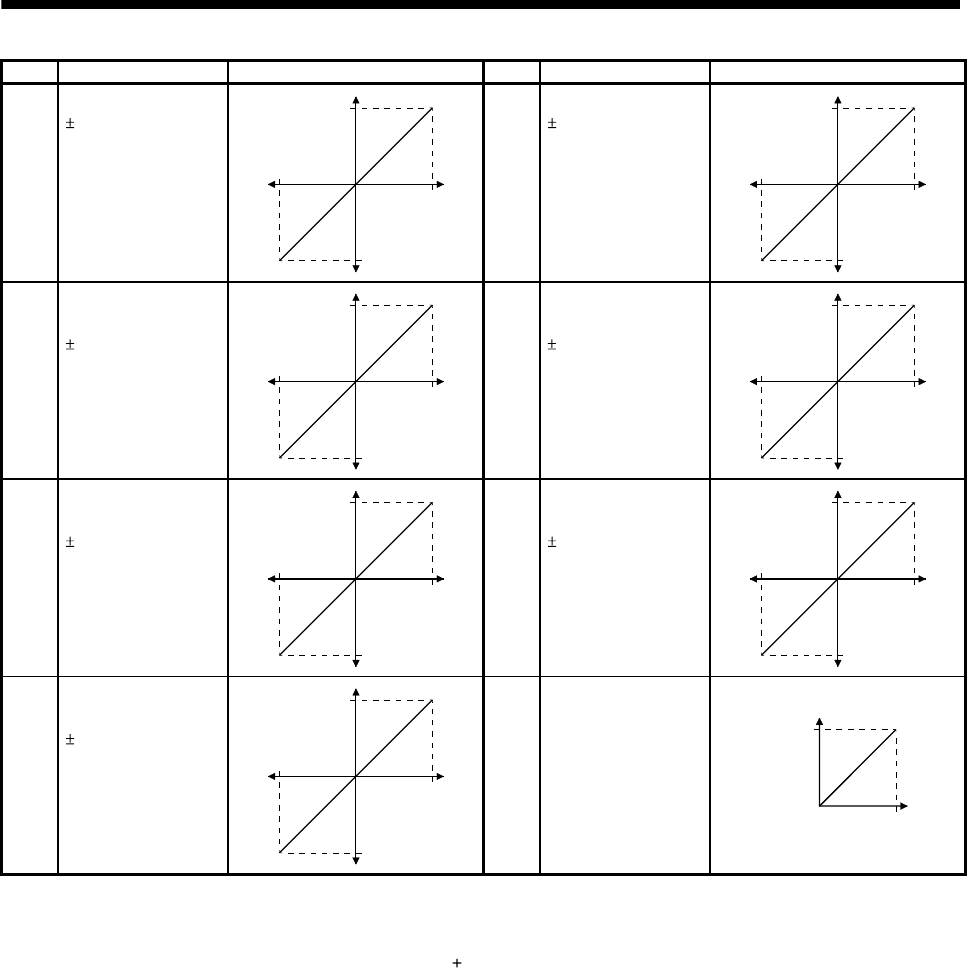
Setting Output item Description Setting Output item Description
6 Droop pulses (Note 1)
(
10V/100 pulses)
100[pulse]
CW direction
CCW direction
100[pulse]
0
10[V]
-10[V]
7 Droop pulses (Note 1)
(
10V/1000 pulses)
1000[pulse]
CW direction
CCW direction
1000[pulse]
0
10[V]
-10[V]
8 Droop pulses
(Note 1)
(
10V/10000 pulses)
10000[pulse]
CW direction
CCW direction
10000[pulse]
0
10[V]
-10[V]
9 Droop pulses
(Note 1)
(
10V/100000 pulses)
100000[pulse]
CW direction
CCW direction
100000[pulse]
0
10[V]
-10[V]
A Feedback position
(Note 1,2)
(
10V/1 Mpulses)
1M[pulse]
CW direction
CCW direction
1M[pulse]
0
10[V]
-10[V]
B Feedback position
(Note 1,2)
(
10V/10 Mpulses)
10M[pulse]
CW direction
CCW direction
10M[pulse]
0
10[V]
-10[V]
C Feedback position
(Note 1,2)
(
10V/100 Mpulses)
100M[pulse]
CW direction
CCW direction
100M[pulse]
0
10[V]
-10[V]
D Bus voltage (Note 4)
400[V]
0
8[V]
Note 1. Encoder pulse unit.
2. Available in position control mode
3. Outputs 8V at the maximum torque.
4. For 400V class servo amplifier, the bus voltage becomes
8V/800V.