


















1 - 4
1. FUNCTIONS AND CONFIGURATION
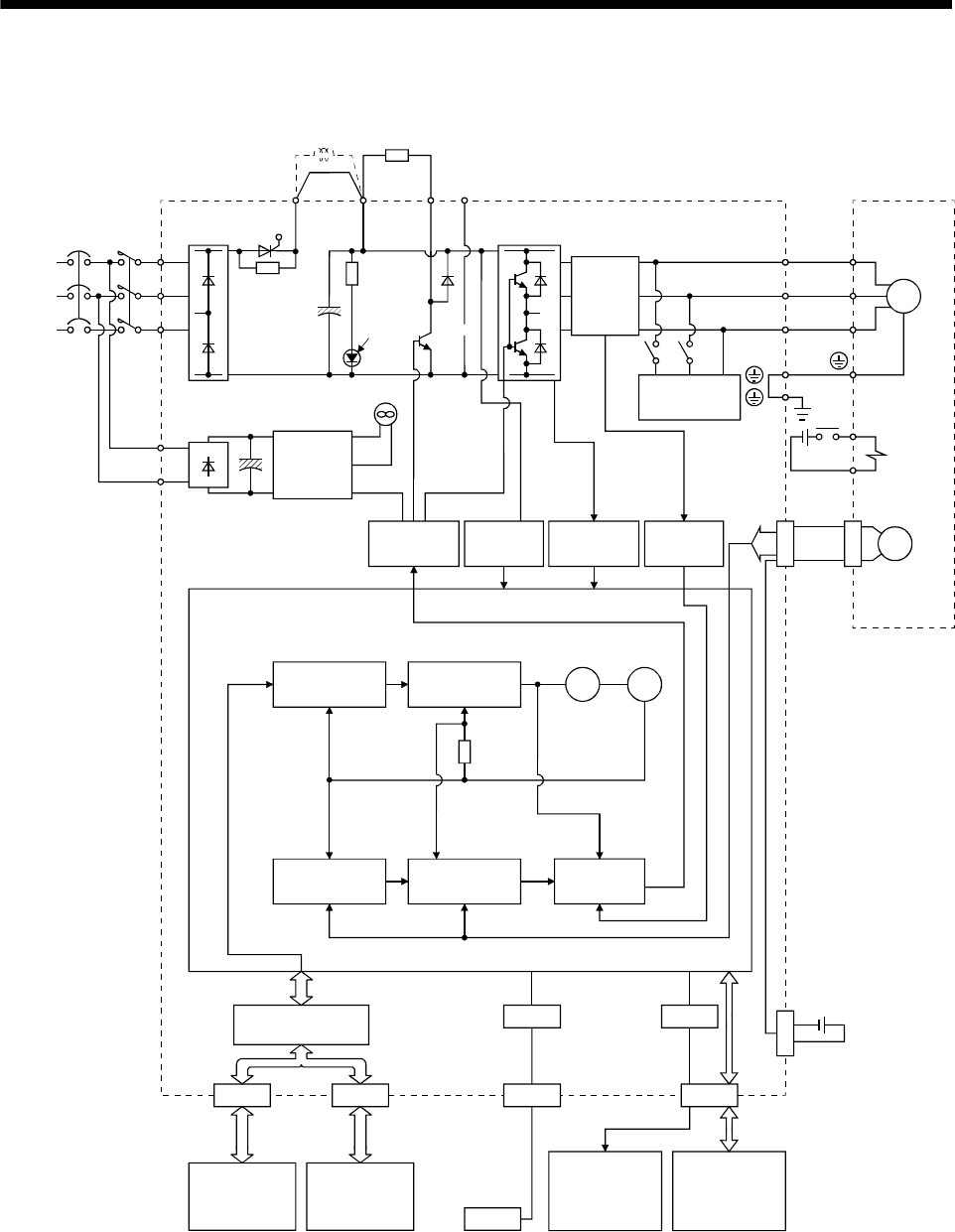
(3) MR-J3-11KB(4) to 22KB(4)
Cooling fan
Base
amplifier
CN4
N
C
Encoder
Current
detection
CN5
NFB MC
L
1
L2
L
3
L
11
L21
B2
U
V
W
B1
USB
USB
Power factor
improving DC
reactor
Regenerative
option
MR-J3BAT
P
1
D/A
Position
command
input
(Note)
Power
supply
CHARGE
lamp
Regene-
rative
TR
Current
detector
Dynamic
brake
Electro-
magnetic
brake
Servo motorServo amplifier
Optional battery
(for absolute position
detection system)
Overcurrent
protection
Voltage
detection
Virtual
encoder
Virtual
motor
Model
torque
Personal
computer
Actual speed
control
Actual position
control
Control
circuit
power
supply
Model position
control
Model
position
Model
speed
CN2
P
U
V
W
M
Model speed
control
Current
control
I/F Control
CN1BCN1A
Controller or
servo amplifier
Servo amplifier
or cap
Analog monitor
(2 channels)
CN3
Digital I/O
control
Diode
stack
Thyristor
RA
24VDC
Note. Refer to section 1.3 for the power supply specification.