

















7 - 14
7. SPECIAL ADJUSTMENT FUNCTIONS
7.6.4 Gain changing operation
This operation will be described by way of setting examples.
(1) When you choose changing by input device
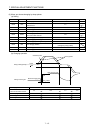
(a) Setting
Parameter No. Abbreviation Name Setting Unit
PB07 PG1 Model loop gain 100 rad/s
PB06 GD2
Ratio of load inertia moment to servo motor
inertia moment
4.0
Multiplier
(
1)
PB08 PG2 Position loop gain 120 rad/s
PB09 VG2 Speed loop gain 3000 rad/s
PB10 VIC Speed integral compensation 20 Ms
PB29 GD2B
Gain changing ratio of load inertia moment
to servo motor inertia moment
10.0
Multiplier
(
1)
PB30 PG2B Gain changing position loop gain 84 rad/s
PB31 VG2B Gain changing speed loop gain 4000 rad/s
PB32 VICB Gain changing speed integral compensation 50 ms
PB26 CDP Gain changing selection
0001
(Changed by ON/OFF of input device)
PB28 CDT Gain changing time constant 100 ms
PB33 VRF1B
Gain changing vibration suppression control
vibration frequency setting
Used to set the value of the after-changing
vibration suppression control vibration
frequency setting.
Hz
PB34 VRF2B
Gain changing vibration suppression control
resonance frequency setting
Used to set the value of the after-changing
vibration suppression control resonance
frequency setting.
Hz
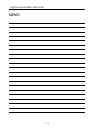
(b) Changing operation
OFF
ON
OFF
Control command
of controller
Change of
each gain
Before-changing gain
After-changing gain
CDT 100ms
Model loop gain 1 100
Ratio of load inertia moment
to servo motor inertia moment
4.0
10.0 4.0
Position loop gain 120 84 120
Speed loop gain 3000 4000 3000
Speed integral compensation 20 50 20