



















3 - 8
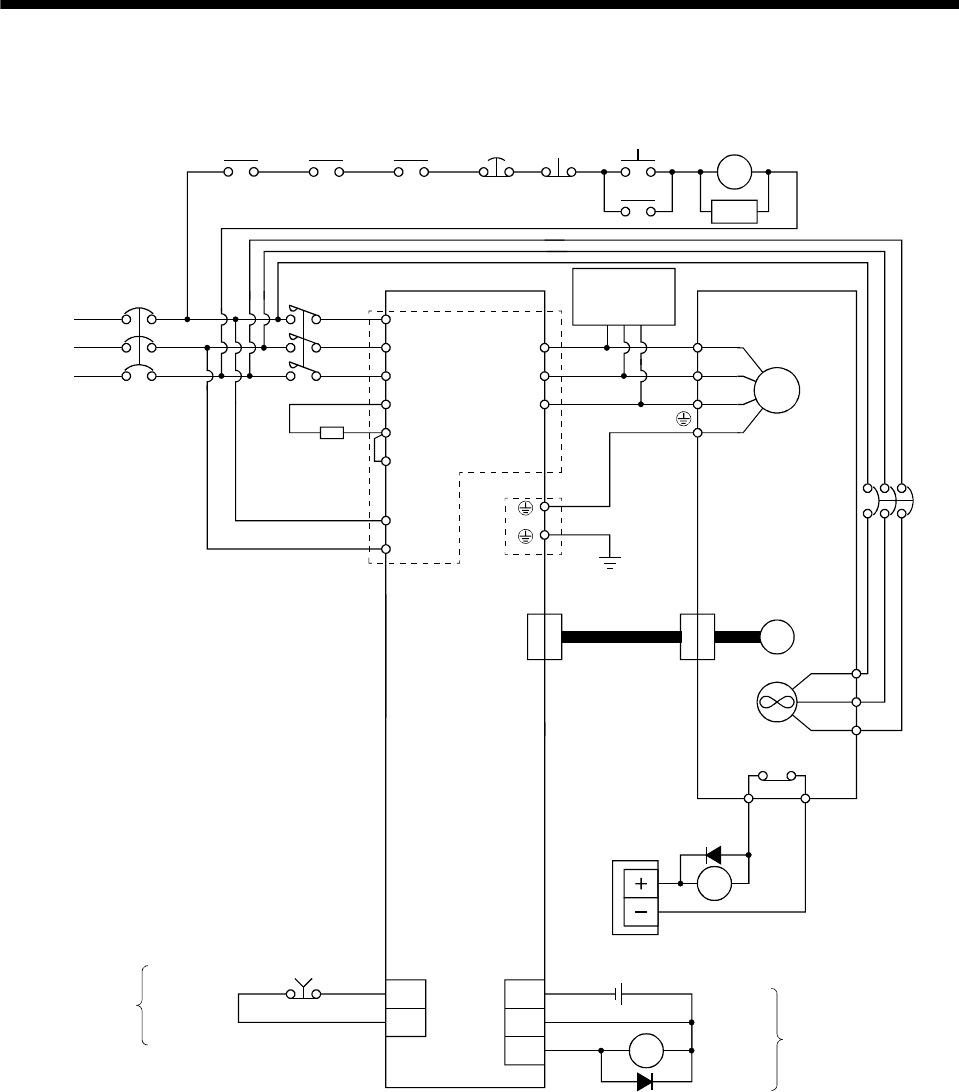
3. SIGNALS AND WIRING
(7) MR-J3-11KB to MR-J3-22KB
BW
BV
BU
Dynamic
break
(Option)
OFF
Forced
stop
ON
MC
MC
SK
(Note 4)
Alarm
RA1
Controller
forced stop
RA2
Servo amplifier
NFB MC
L
1
L
2
L
3
3-phase
200 to
230VAC
P
C
TE1
PE
L
11
L
21
U
V
W
M
Encoder
CN2
(Note 3)
Encoder cable
(Note 6)
P
1
(Note 1)
(Note 2)
Regenerative
resistor
Cooling fan
24VDC
power supply
OHS2OHS1
Servo motor
thermal relay
Servo motor
thermal relay
RA3
RA3
U
V
W
Servo motor
(Note 7)
EM1
ALM
RA1
DICOM
DOCOM
24VDC
DOCOM
Forced stop
CN3CN3
(Note 5)
Trouble
(Note 4)
(Note 5)
NFB
Note 1. Always connect P1 and P. (Factory-wired.) When using the power factor improving DC reactor, refer to section 11.13.
2. When using the regenerative option, refer to section 11.2.
3. For the encoder cable, use of the option cable is recommended. Refer to section 11.1 for selection of the cable.
4. If deactivating output of trouble (ALM) with parameter change, configure up the power supply circuit which switches off the
magnetic contactor after detection of alarm occurrence on the controller side.
5. For the sink I/O interface. For the source I/O interface, refer to section 3.7.3.
6. Refer to section 3.10.
7. Cooling fan power supply of the HA-LP11K2 servo motor is 1-phase. Power supply specification of the cooling fan is different
from that of the servo amplifier. Therefore, separate power supply is required.