


















5 - 24
5. PARAMETERS
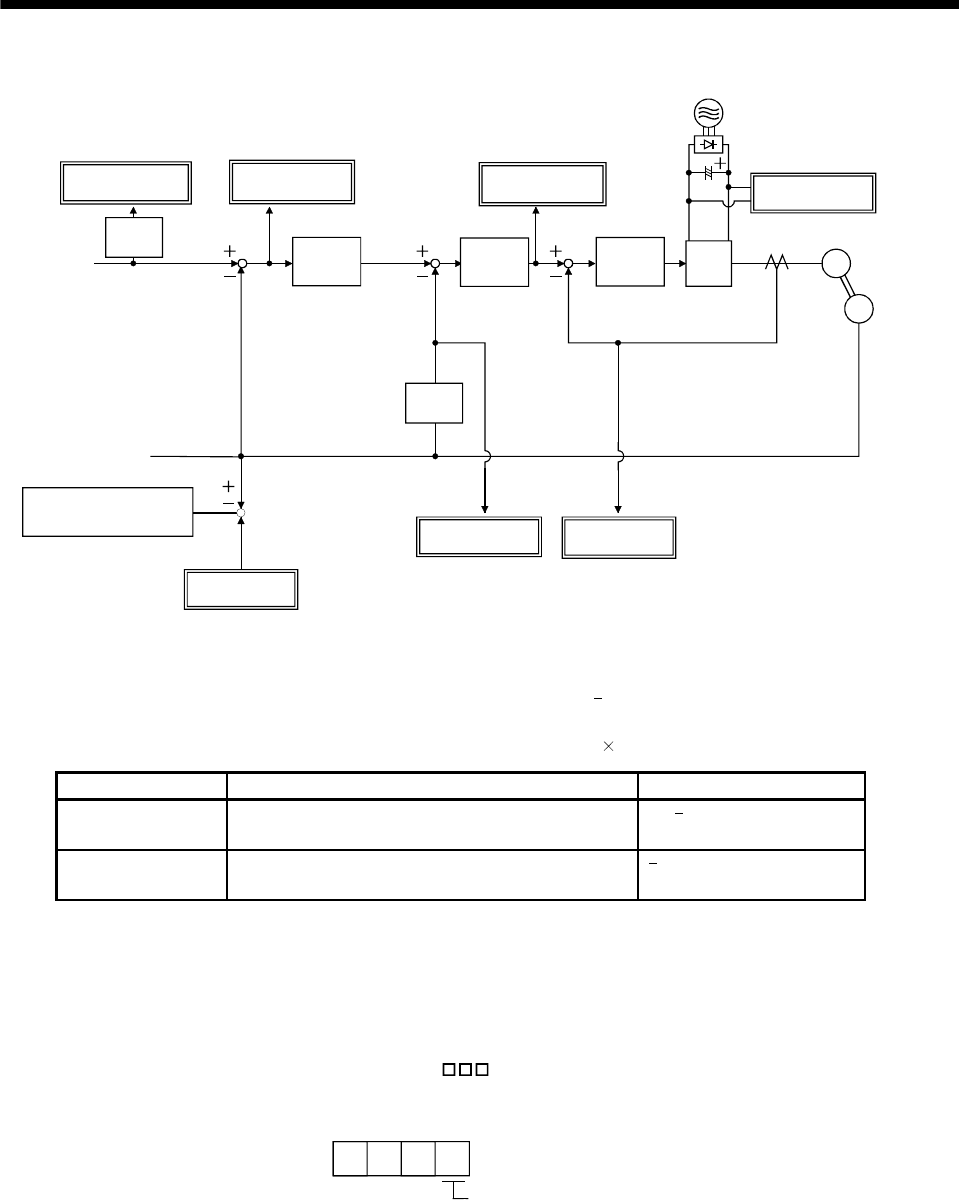
(3) Analog monitor block diagram
PWM M
Feedback
position
Current
control
Speed
control
Current
command
Position
control
Droop pulse
Differ-
ential
Speed
command
Bus voltage
Speed
command
Current feedback
Position feedback
Servo Motor
speed
Current encoder
Servo Moto
r
Encoder
Torque
Position
command
received
from a
controller
Feedback position
standard position (Note)
Differ-
ential
Position feedbac
k
data returned to
a controller
Note. The feedback position is output based on the position data passed between servo system controller and servo amplifier. The
parameter number No.PC13/PC14 can set up the standard position of feedback position that is output to analog monitor in order
to adjust the output range of feedback position. The setting range is between
99999999 and 99999999 pulses.
Standard position of feedback position = Parameter No.PC14 setting value 10000 + Parameter No.PC13 setting value
Parameter No. Description Setting range
PC13
Sets the lower-order four digits of the standard position
of feedback position
9999 to 9999 [pulse]
PC14
Sets the higher-order four digits of the standard position
of feedback position
9999 to 9999 [10000pulses]
5.3.4 Alarm history clear
The servo amplifier stores one current alarm and five past alarms from when its power is switched on first. To
control alarms which will occur during operation, clear the alarm history using parameter No.PC21 before
starting operation.
Clearing the alarm history automatically returns to "
0 ".
After setting, this parameter is made valid by switch power from OFF to ON.
Alarm history clear
0: Invalid (not cleared)
1: Valid (cleared)
0
00
Parameter No.PC21