



















5 - 10
5. OPERATIONAL FUNCTIONS
For the end point of continuous operation, if the position after deceleration stop exceeds the command
position. A selection can be made from the following control option 2 (parameter No.0201).
1) Stop by the alarm
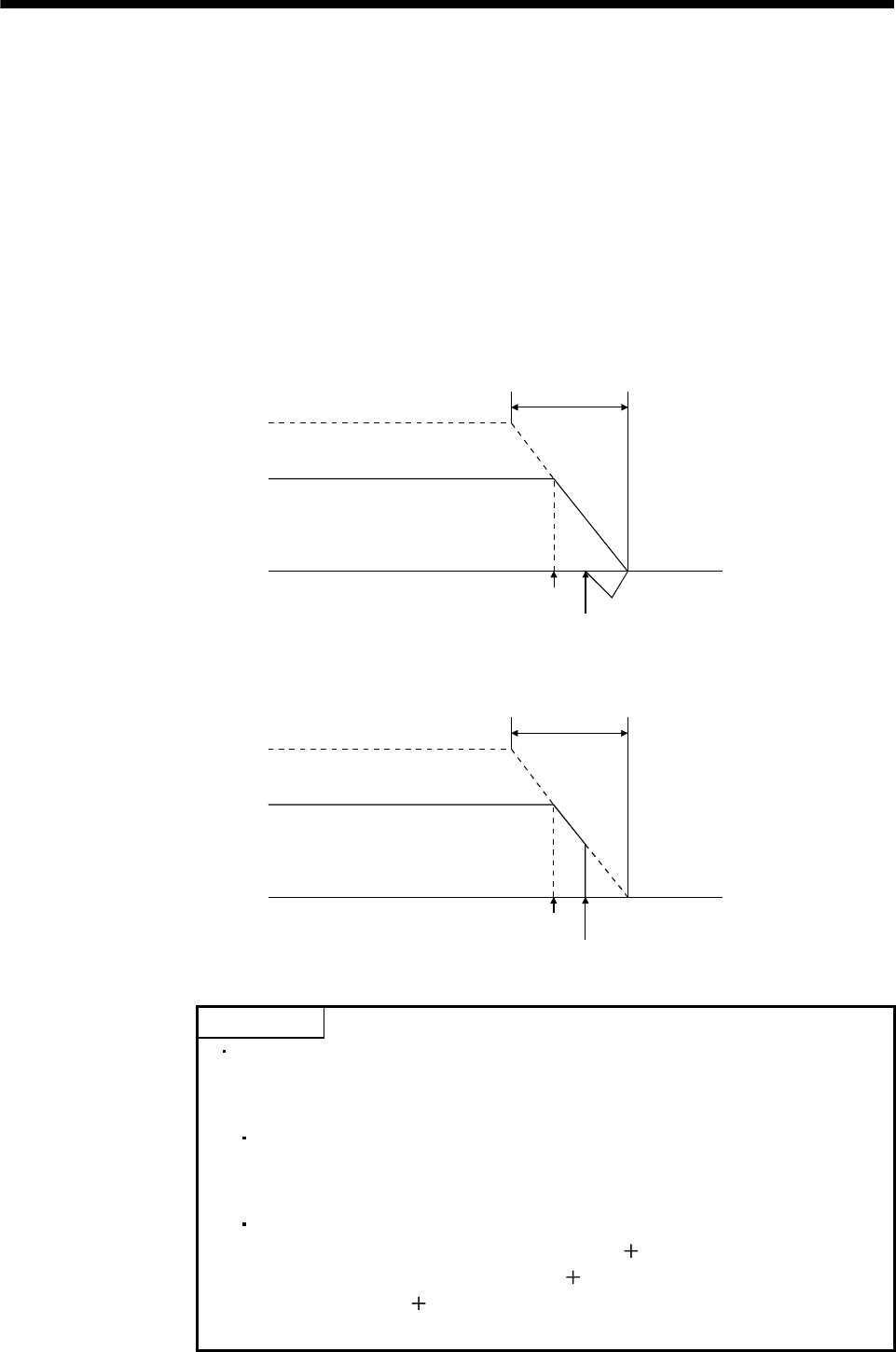
2) After completion of the deceleration stop, return to the command position
3) Stop at the command position
For selection 2), the stop position over-bound signal (POV) is turned on. The stop position over-bound
signal (POV) is turned off at the next start up.
2) After completion of the deceleration stop, return to the command position
Deceleration
time constant
Speed limit
value
Command
speed
Previous point position
Next point position
3) Stop at the command position
Deceleration
time constant
Speed limi
t
v
alue
Command
speed
Previous point position
Next point position
POINT
There are times, such as that shown below, where the deceleration position
exceeds the command position. This causes a position exceeded during
positioning (operation alarm 24, detail 01) and operation is stopped.
For when the movement direction is reversed when position of the next
point from the point designated by the deceleration check system under
continuous operation.
For the case where deceleration check system goes from continuous
operation (point n) to smoothing stop (point n
1) or in-position stop and
then goes to reverse direction (point n
2) even when the point table is in
this order, if point n
1 positioning distance is not satisfied by the necessary
deceleration distance from the point n command speed.