













11 - 23
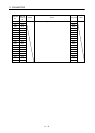
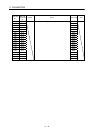
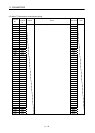
11. PARAMETERS
Parameter
No.
Symbol Name
Initial
Value
Units
Setting
range
Function
When tandem
drive is being
used
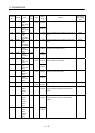
0201 OPC2 Control
option 2
0000h 0000h
to 0121h
Position switch judgement conditions
Set the position switch judgement
conditions
0: Current command position
1: Current feedback position
Continuous operation position over-
bound processing
Defines processing for when the stop
position exceeds the command
position during operation.
0: Alarm
1: Return to command position
2: Stop firmly at command
position
Change of position over-bound
processing
Set processing for when the stop
position exceeds the command
position during position change.
0: Alarm
1: Return to command position
0
Master
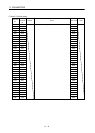
0202 *OPC3 Control
option 3
0001h 0000h
to 0001h
Interlock signal polarity
Set the polarity of the Interlock
signal.
0: B-contact
1: A-contact
000
Master
0203 *AXALC Axis No.
assignment
0000h 0000h
to 011Fh
0
Servo amplifier axis No.
Set the servo amplifier axis No. to
be assigned to the axis Nos. on the
position board. (Note 1, 2 and 3)
00h: No axis No. assignment
01h to 14h: Axis No.
Example) 0Ah: Axis No. 10
Servo amplifier line No.
Set the servo amplifier line No. to be
assigned to the axis Nos. on the
position board.
0 to 1: Line No.-1
Each axis
0204 ITM1 Interrupt
condition 1
0000h 0000h
to FFFFh
Set interrupt condition 1. Each axis