5 - 36
5. OPERATIONAL FUNCTIONS
[Cautions]
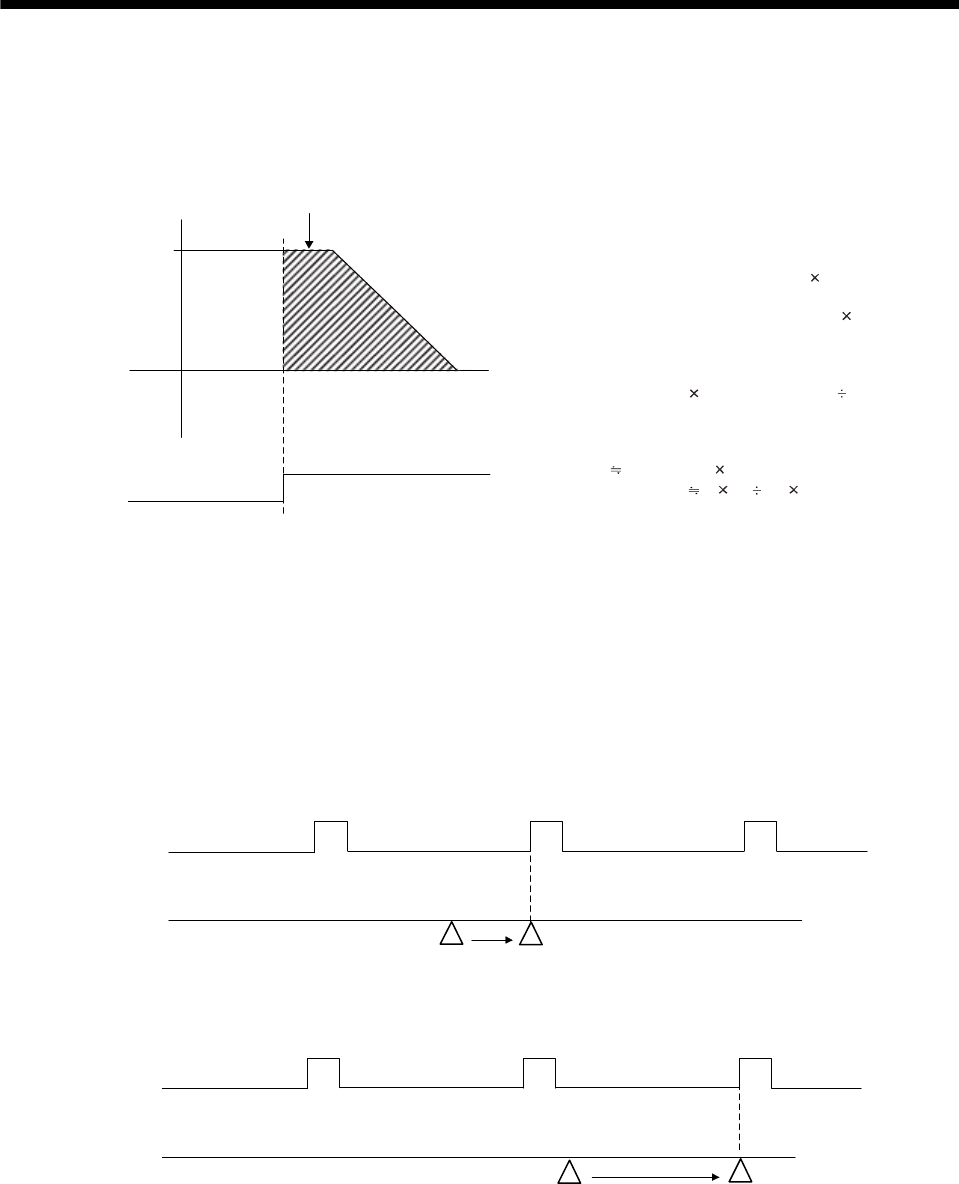
In the sequence 2) above, stop processing by response delay to the home position sensor signal and
deceleration occurs during the time until the axis stops.
Stop processing
Home position
sensor signal
Stop processing = La + Lb + Lc + Ld
La: Travel distance associated with delay time
(Ta) from sensor-on to JOG operation stop
command issued = (Moving speed) Ta (Note 1)
Lb: Travel distance associated with delay time
(Tb) of position board = (Moving speed) Tb (Note 2)
Lc: Travel distance associated with delay of servo
= (distance equivalent to drop pulse) (Note 3)
Ldc: Distance which deceleration takes
=(Moving speed) (Deceleration time) 2
Note 1. Depending on the specification of user program
side
2. Tb Control cycle 2
3. (Droop pulse) (N Pt) (60 PG1)
N: Motor speed (r/min)
Pt: Number of pulses per revolution
PG1: Position loop gain 1
4. The unit of droop pulse calculated here is
equivalent to the motor end encoder resolution.
This stop processing changes depending on dispersion of the response delay of the sensor signal.
Therefore, reference encoder Z-phase of sequence 3) above may change by one revolution of the motor
when stop position is near the encoder Z-phase by the relationship between home sensor position signal
and encoder Z-phase.
1) When stop position is before the encoder Z-phase
-phase pulse
Stop
position
Home
position
2) When stop position is after the encoder Z-phase
Z-phase pulse
Stop position Home position
To avoid this event, adjust position relationship between home position sensor signal and encoder Z-phase,
adjust the command speed of JOG operation or set correct value to Z-phase mask amount
(parameter No.0250, 0251).



















































































































































































































































































































































































































































































































































































































































































