



















9 - 39
9. INTERFACE MODE
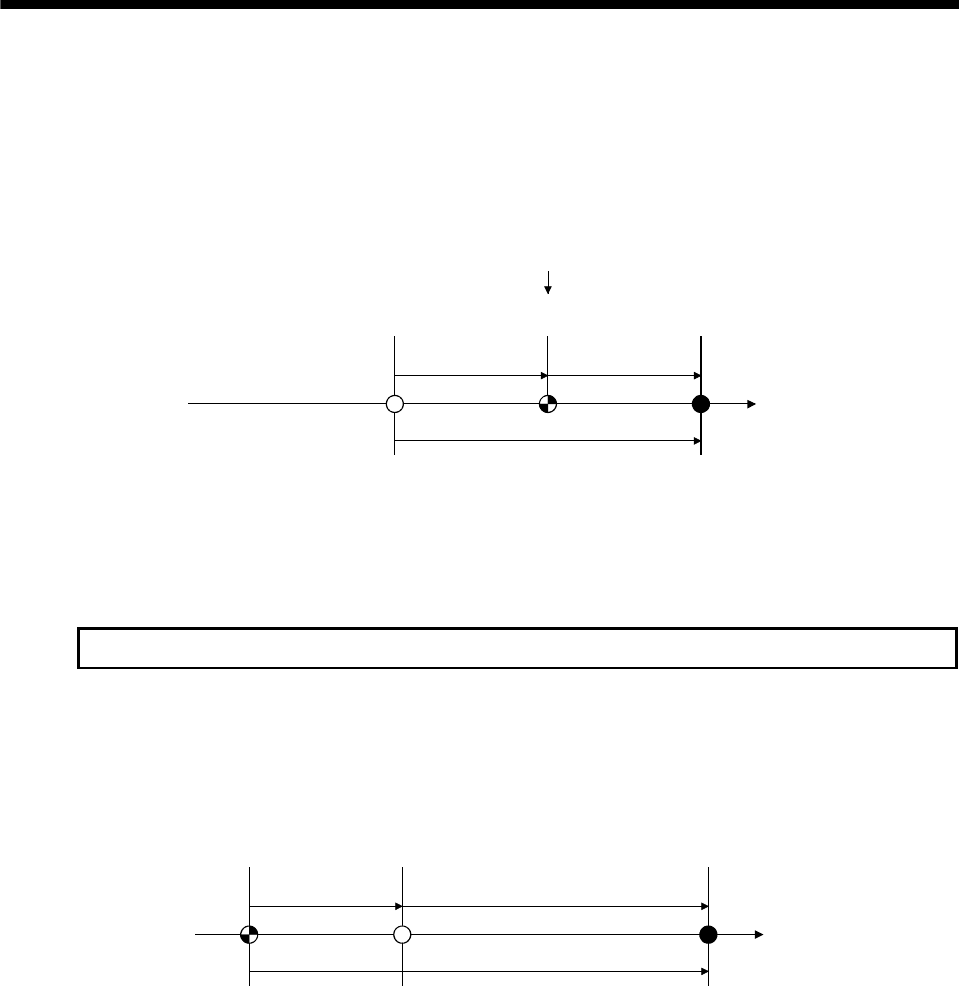
(3) After home position return
Position board also operates with the same coordinate system as when connected to SSCNET after home
position return. As a result, the machinery command position and position command deviate by the
difference between the new coordinate system and the coordinate system when connected to SSCNET.
Set the amount of deviation to the home position offset.
Position command
Home
position
Absolute position restored
by servo amplifier (=0)
Home position offset
Machinery
command position
Current command
position
Note. 0 position is the position in the coordinate system where machinery
command position is 0 when restoring absolute position, or after home
position return. (When the home position coordinate is 0, this is the
position after performin
g
home position return
)
When home position coordinate is 0, the next time connecting
to SSCNET, this position becomes the 0 position(Note).
Except for when home position coordinate is 0, the formula for calculating home position offset is as follows.
Home position offset = Position command at home position return – Home position coordinate
(4) After restoring absolute position
After restoring the home position, the machinery command position and position command are equivalent,
thus set home position offset to 0.
Position command
0 position(Note) when
absolute position
is restored
by servo amplifier
Absolute position restored
by servo amplifier
Home position offset=0
Current command
position
Restored absolute
position Machinery command position
Note. 0 position is the position in the coordinate system where machinery
command position is 0 when restoring absolute position, or after home
position return. (When the home position coordinate is 0, this is the
position after performing home position return)