



















6 - 13
6. APPLICATION FUNCTIONS
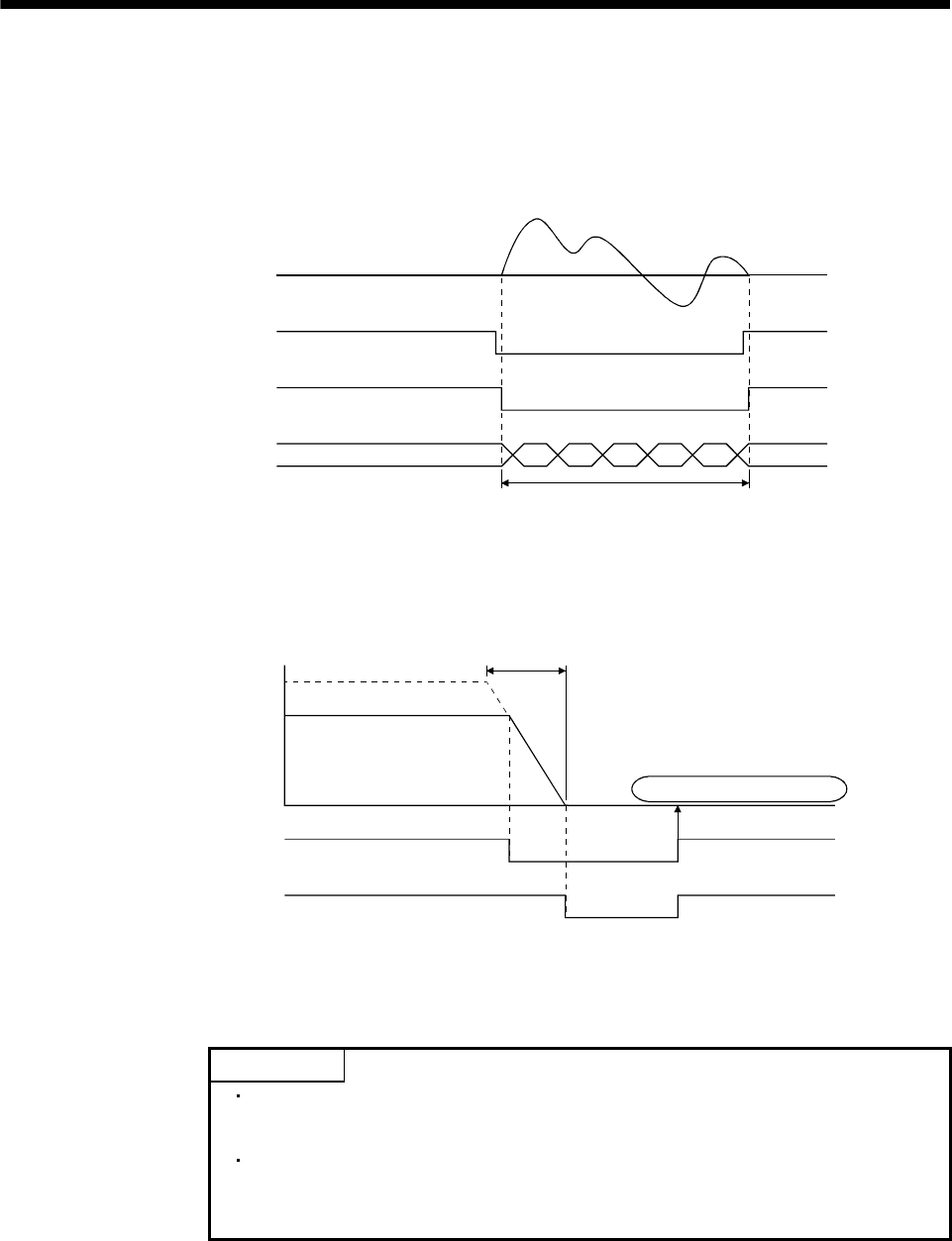
6.4 Servo off
If an axis has moved due to an external force while the servo was off, the current command position is updated
in accordance with the movement amount (Current feedback position). After the servo has been off, coordinate
return processing such as return to home position is not necessary.
ON
OFF
ON
OFF
A
ctual Speed
Servo On (SON)
Servo ready (RDY)
Current command position is updated in accordance
with distance moved while servo is off.
Current command
position
If the servo on signal (SON) is turned off during operation, an alarm occurs, movement is rapid stopped, and
the servo is turned off. Even if the servo on signal (SON) is turned back on, operation does not resume.
ON
OFF
ON
OFF
Command speed
Servo On (SON)
Servo ready (RDY)
Speed limit value
(Note)
Rapid stop time constant
Operation does not resume.
Note. If 1: Smoothing filter is set in Speed options (parameter No.0220), the smoothing time constant is always valid.
Therefore, rapid stop as well will use smoothing filter.
API LIBRARY
To turn ON/OFF the servo ON command (SON), set SSC_CMDBIT_AX_SON
to the command bit number of the sscSetCommandBitSignalEx function.
To check if servo ready (RDY) is ON/OFF, set SSC_STSBIT_AX_RDY to the
status bit number with the sscGetStatusBitSignalEx or
sscWaitStatusBitSignalEx functions.