



















9 - 36
9. INTERFACE MODE
9.10 Coordinate management
This section shows an example of how to approach coordination management.
9.10.1 Incremental system
When using servo amplifiers with incremental system setting, the current command position (position
command) when SSCNET connection is restored is 0. Afterwards, a coordinate system value for a position of 0
when the SSCNET is connected needs to be used for the position command that the user program applies to
position board until connecting to SSCNET again. In many cases, the actual home position of the machine and
the home position of the position command (position when SSCNET is connected) are different, therefore, the
position command is calculated using the machinery command position and home position offset with the
following formula.
Position command = Machinery command position + Home position offset
(1) When connected to SSCNET
Because the current command position (position command) when SSCNET connection is restored is 0, set
home position offset to 0.
Until home position is determined, machinery command position is undefined. Use the position that is
referred to when connected to SSCNET (=0) as the machinery command position.
Absolute position restored by servo amplifier (=0)
Current command position
Position command (=machinery command position)
Home position offset (=0)
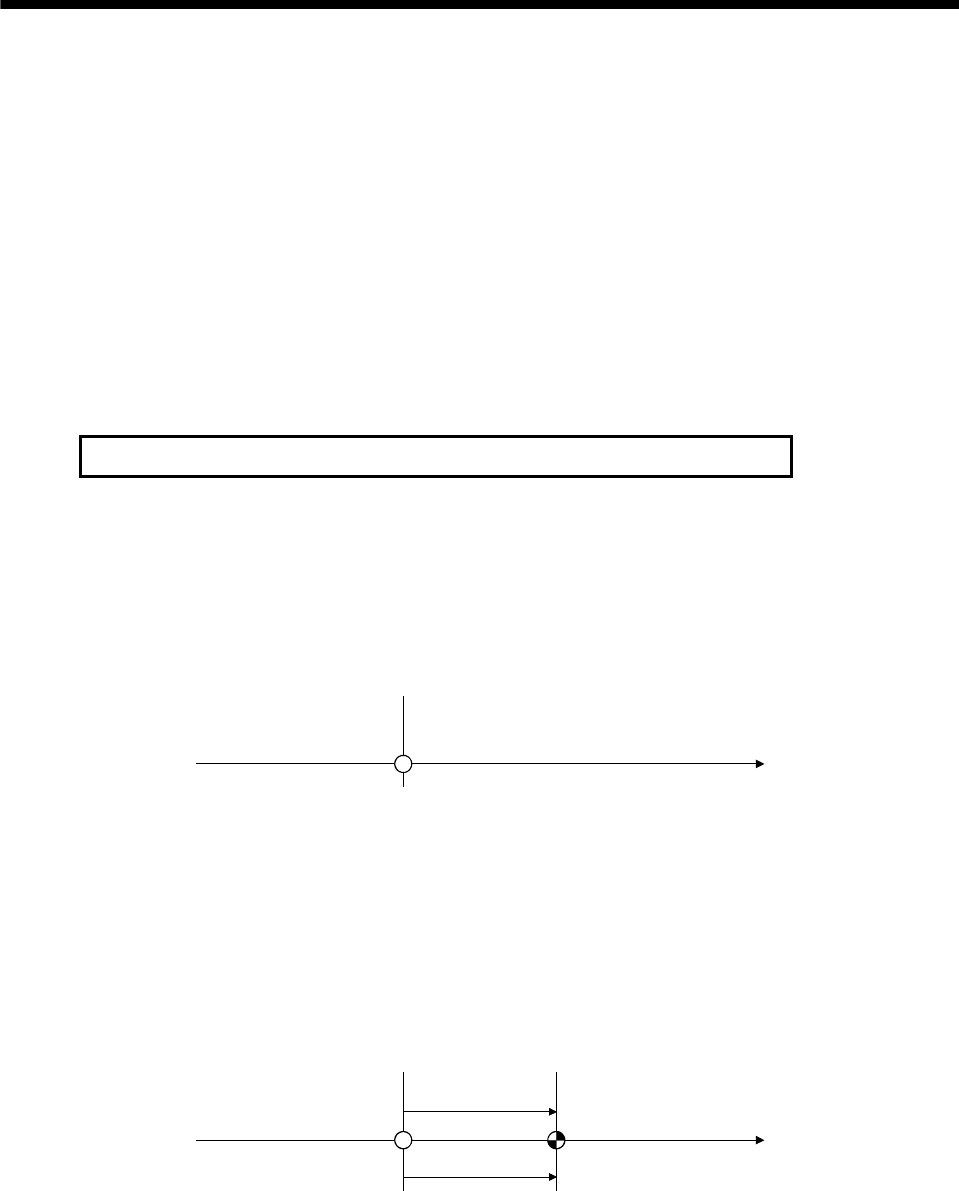
(2) Home position return
When home position return is required, move to home position on the user program side. The home
position of the position command (distance from position when connected to SSCNET to home position) is
the home position offset after home position return.
In an incremental system, home position set for position board is not required.
Position command
Machinery command position (=0)
Current command position
Home position
Home position offset
Absolute position restored
by servo amplifier (=0)