



















6 - 90
6. APPLICATION FUNCTIONS
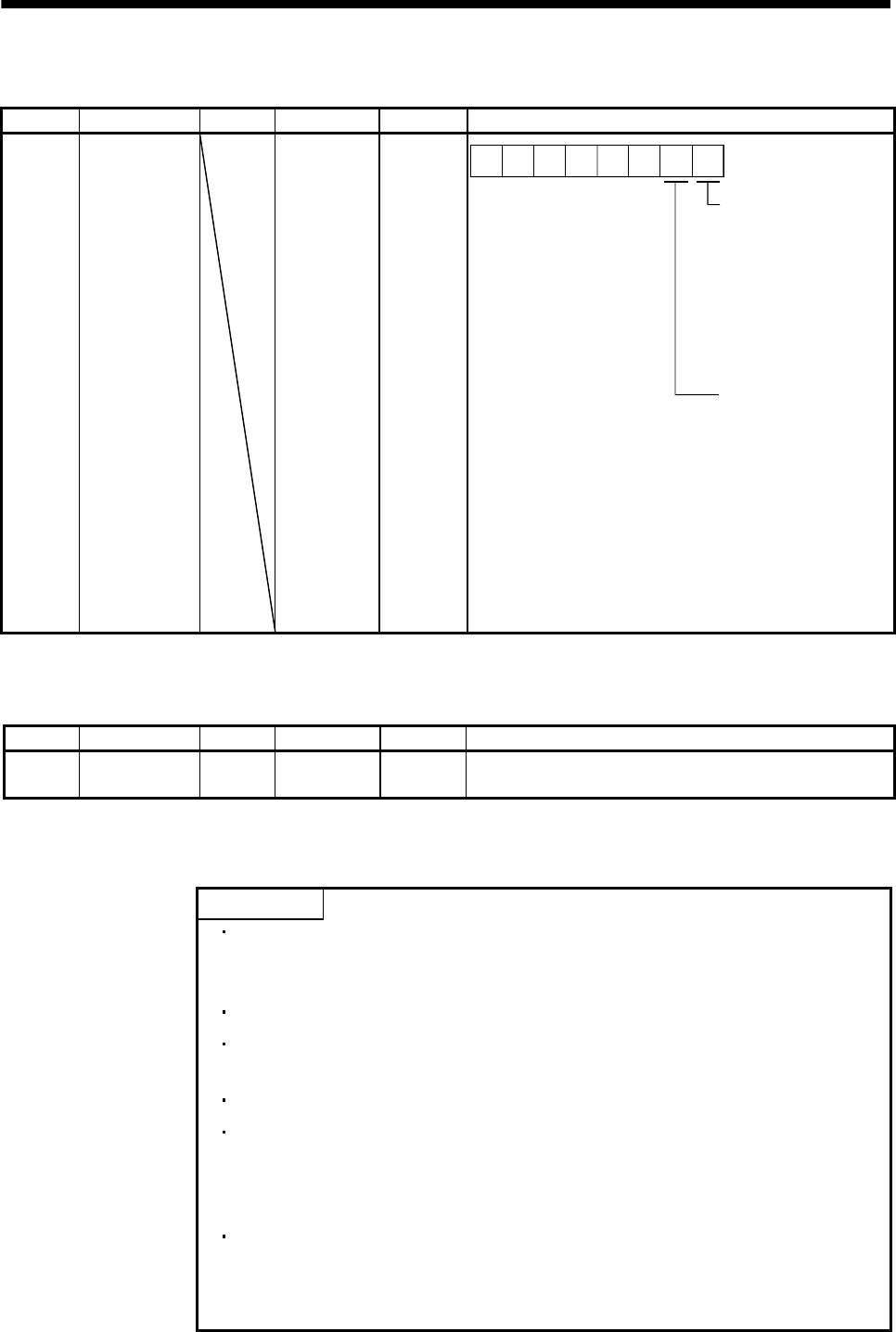
(a) Details on pass position option
Address Name Unit Setting range Initial value Remarks
A640 Pass position
option (4 bytes)
00000000h
to 00000011h
00000000h
Pass direction
Set the pass direction
for the pass position
data.
0: + direction pass
position interrupt
output
1: - direction pass
position interrupt
output
Judgment condition
Set the judgment
condition for the pass
position data.
0: Current command
position
1: Current feedback
position
Note. Only the setting
for the pass
position condition
start number is
valid.
000000
Note. The above address is the address for the pass position condition 1. For the pass position condition 2 and above, increase in units
of 8h for each number.
(b) Details on the pass position data
Address Name Unit Setting range Initial value Remarks
A644 Pass position
data (4 bytes)
Command
unit
-2147483648
to 2147483647
0 Set the pass position data at the pass position interrupt output.
Note. The above address is the address for the pass position condition 1. For the pass position condition 2 and above, increase in
units of 8h for each number.
POINT
Set the pass position condition in passing order since the pass position
conditions are judged one by one in ascending order of the pass position
condition number.
The interrupt is output only once for each pass position condition.
When a passed position is the pass position condition, the interrupt is not
output until the position is passed again.
Ensure one control cycle or longer between two pass position conditions.
Only the judgment condition for the pass position condition start number is
valid only for the pass position option. The judgment condition is used for
each pass position data as the common setting. (The judgment condition
cannot be set individually for each pass position condition.)
When the current feedback position is selected as the judgment condition for
the pass position data, do not set the pass position data within the in-position
range. The pass position interrupt may not be output since the pass position
judgment ends when the in-position signal (INP) turns on.