



















App. - 39
APPENDIX
(1) When selecting the driver input
When 1 (driver input) is selected as the sensor destination, the sensor (LSP, LSN, DOG) status connected
to the driver is imported via SSCNET.
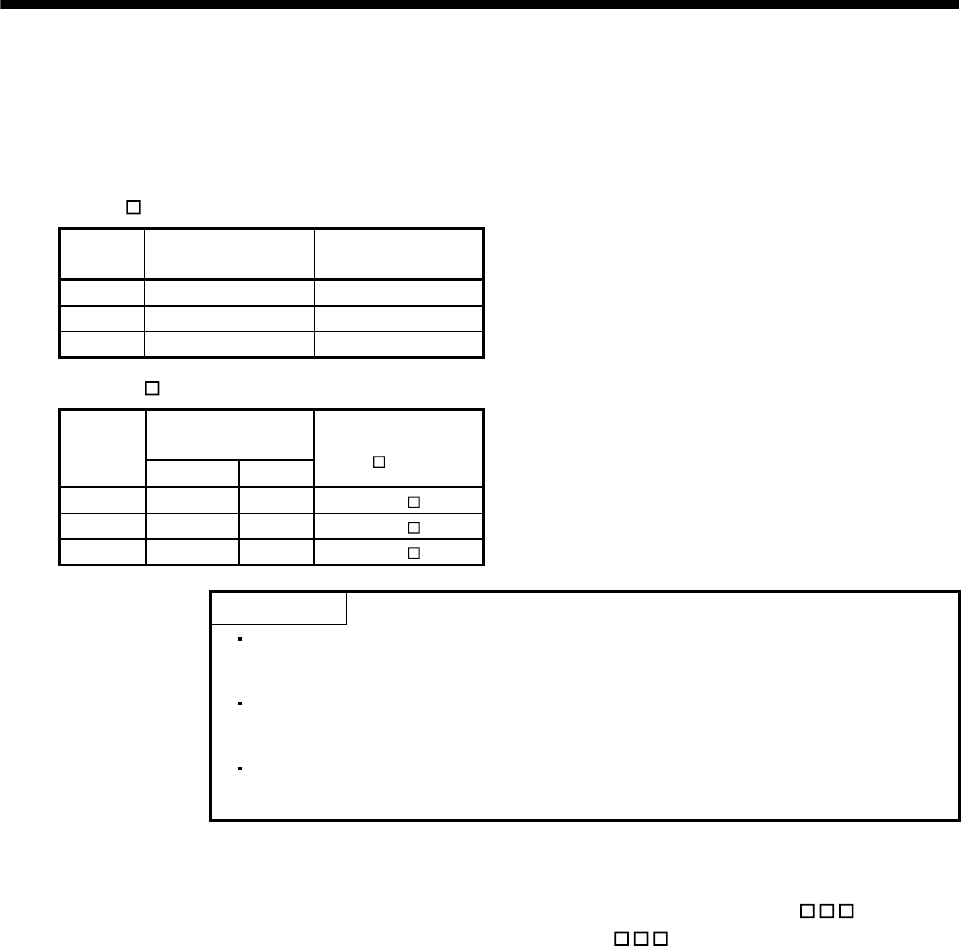
(a) MR-J3-
B is used as a servo amplifier
Signal
Name
Destination connector
pin No.
Abbreviation
LSP CN3-2 D11
LSN CN3-12 D12
DOG CN3-19 D13
(b) MR-J3W-
B is used as a servo amplifier
Signal
Name
Destination connector
pin No.
Abbreviation
(
: A, B)
A-axis B-axis
LSP CN3-7 CN3-20 DI1-
LSN CN3-8 CN3-21 DI2-
DOG CN3-9 CN3-22 DI3-
POINT
For sensor connection to the driver, refer to the instruction manual of the
driver.
If communication error (system error E401 to E407) occurs, sensor (LSP,
LSN, DOG) input status turns off.
If communication error (system error 400) occurs, the input status of the
corresponding axis turns off.
(2) When selecting the digital input
When 2 (digital input) is selected as the sensor destination, the digital input signal (DI_
) is used as
the sensor (LSP, LSN, DOG). Specify the digital input signal (DI_
) in the sensor signal connection
specification (parameter No.021A to 021C).
Refer to section 6.26 and 6.27.
(3) When selecting not connected
When 3 (not connected) is selected as the sensor destination, the sensor (LSP/LSN/DOG) is not detected.
Limit switch functions are always invalid. In the home position return using the proximity dog, the position
board operates without detected proximity dog.