



















6 - 123
6. APPLICATION FUNCTIONS
6.31.2 Interface
Set the following data when using continuous operation to torque control.
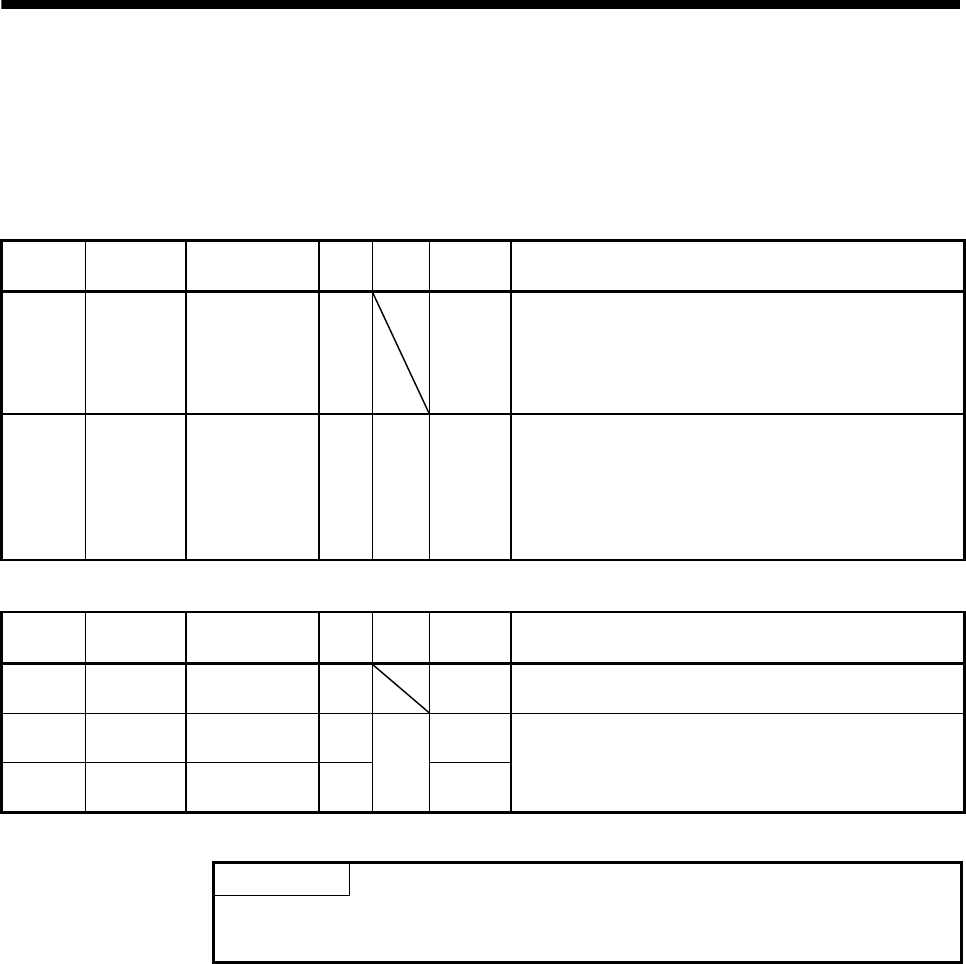
(1) Parameter
(a) Servo parameter
Parameter
No.
Abbreviation Name
Initial
value
Units
Setting
range
Function
110D *POL Rotation
direction
selection/travel
direction
selection
0 0 to 1 Select the rotation direction or travel direction for the command
input pulse.
1142 TFBGN Torque
feedback loop
gain
18000 rad/s 0 to 18000 Set the torque feedback gain for continuous operation to torque
control.
By setting a smaller value, the contact load at continuous
operation to torque control can be reduced.
When setting value is less than 6[rad/s], a setting value of
6[rad/s] is set.
(b) Control parameter
Parameter
No.
Abbreviation Name
Initial
value
Units
Setting
range
Function
0205 ITM2 Interrupt
condition 2
0000h 0000h to
FFFFh
Set interrupt condition 2.
0222 SPLL Speed limit
value (lower)
0BB8h Speed
units
0000h to
FFFFh
Set the value for the moving speed limit.
0223 SPLH Speed limit
value (upper)
0000h 0000h to
7FFFh
API LIBRARY
• Use the sscChange2Parameter/sscCheck2Parameter functions to set/get
parameters.