


















13 - 6
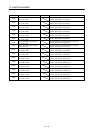
13. ALARM NUMBER
Alarm
No.
Content
Detail
No.
Cause of occurrence Procedure
40
Linear
interpolation start
up error
01
Axes that have been set to something
besides linear interpolation mode (LIP) are
included in the same group.
Designate all of the axes in the group as linear
interpolation mode (LIP).
02
There are 5 or more axes in the group
formation.
Set the group formation to a maximum of 4 axes.
03
Start operation was performed for linear
interpolation with the invalid linear
interpolation group number.
Reexamine the linear interpolation group
(parameter No.0260). Refer to Section 5.4 linear
interpolation for further details concerning valid
group number.
04
The number of points defined for axes in
the group is different.
Set the same number of points for all axes.
05
The speed unit for the primary axis
(parameter No.0200) is defined to be r/min.
Change the speed units.
41
Linear
interpolation point
data error
01
The movement amount in the group
exceeds the maximum value "999999999".
Set it to the correct data.
02
With excessive speed processing
(parameter No.0261) set to "1: alarm stop",
the group formation axis exceeds the
speed limit.
Reexamine feed speed and speed limit values.
42
Can't start linear
interpolation
auxiliary axis error
01 The auxiliary axis is in operation.
Perform start operation for linear interpolation
after making sure all axes in the group are
stopped.
02 The auxiliary axis has an alarm set.
Remove the cause for the alarm on the auxiliary
axis.
43
Interference
check axis setting
error
01
The axis is set up as the interference
check axis.
Set it to the correct data.
02
The axis in the same linear interpolation
group as the axis is set up as the
interference check axis.
44
Command error in
interference area
01
Commanded to move into interference
area.
Perform a commanded to move out of the
interference area.
45
Entering
interference area
error
01 Entered interference area during operation.
(1) Confirm that the parameter settings related to
interference check are correct.
(2) Change the operation pattern so that the
interference area is not entered.
4D
Other axes start
setting error
01 The start condition setting is erroneous.
Set correct data.
02 The operation setting is erroneous.
50
Tandem drive
mode change
error
01
Drive mode change was attempted while
tandem drive axis mode toggling was
prohibited.
Only attempt to change drive mode when change
conditions are satisfied.
Refer to Section 8.1.3.
51
While in tandem
drive non-
synchronous
mode
01
Home position return, automatic operation,
or linear interpolation operation was
attempted while in non-synchronous micro
adjustment mode of tandem drive axes.
Perform home position return, automatic operation
as well as linear interpolation operation while in
synchronous mode.
52
Tandem drive
axis setting error
01
A home position return method other than
dog method, dog cradle method, data set
method, scale home position signal
detection method, or dog front end method
was attempted for home position return
while in tandem drive axis mode.
Set the home position return option 1 to one of the
return to home position methods listed to the left.
02
A second axis is not set for the tandem
drive axis group. Or 3 or more axes are set
up with the same tandem drive group
number.
Set up the tandem drive axis group number in
pairs.
53
Tandem drive
excessive
deviation
01
The deviation between the master axis and
slave axis for tandem drive axes exceeds
the tandem drive excessive deviation width
of the parameter.
Make adjustments so that the deviation between
the master axis and slave axis is reduced. And
reexamine excessive deviation width and delay of
start detection for excessive deviation, defined in
the parameters.
54
Tandem drive
synchronous
alignment valid
width error
01
When deviation exceeds the synchronous
alignment valid width during calculation
error correction performed for servo on,
while in tandem drive synchronous mode.
Reexamine the parameter synchronous alignment
valid width. As the home position return is
incomplete (home position return request (ZREQ)
is ON), execute home position return again.
55
Tandem drive
while performing
synchronization
01
When start of operation is executed during
calculation error correction performed for
turning on of the servo, while in tandem
drive synchronous mode.
Do not perform start up while the "synchronizing"
signal (SYEO
) is on.