



















6 - 14
6. APPLICATION FUNCTIONS
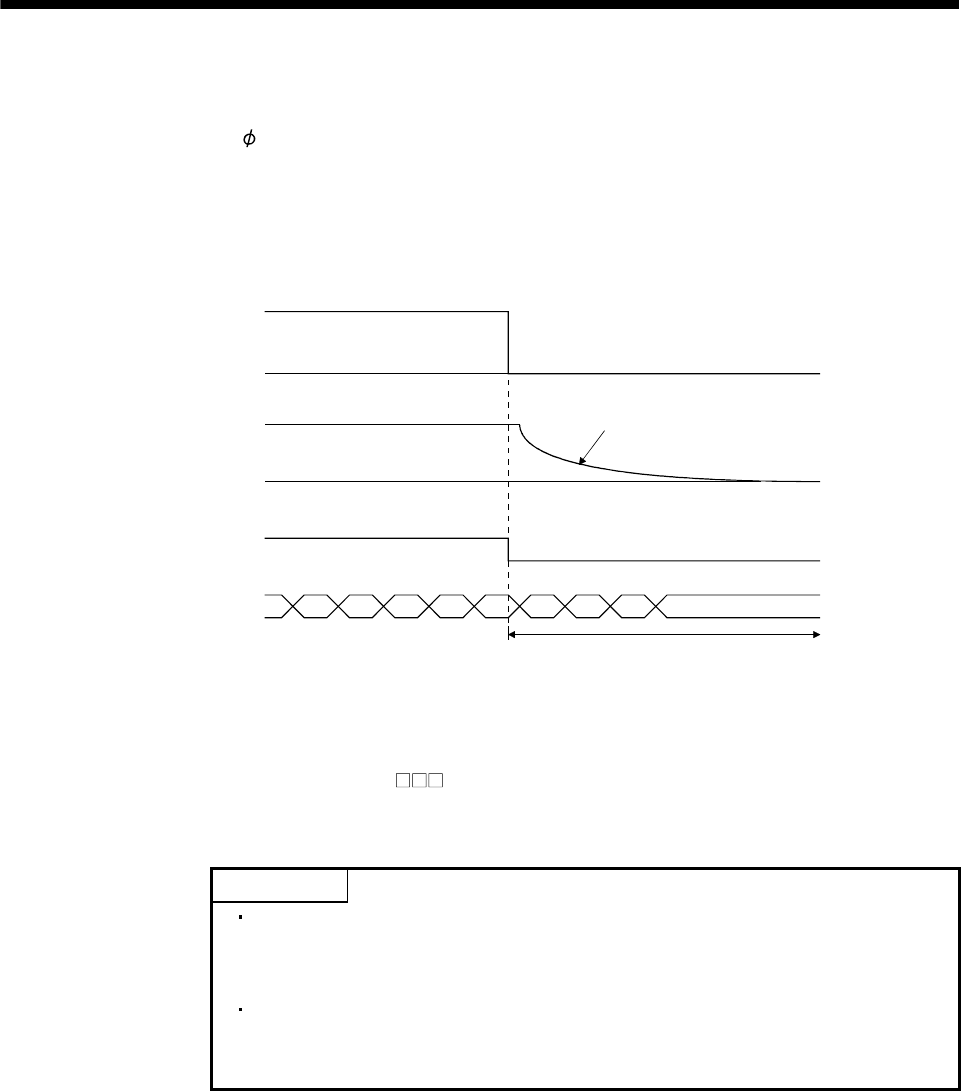
6.5 Forced stop
Commands are turned to "
" at forced stop. Servo amplifiers become free from the control of the position
board and stops according to their specifications or settings such as dynamic brake stop and deceleration to a
stop. For details, refer to the Servo Amplifier Instruction Manual on your servo amplifier.
During forced stopping, the current command position is updated according to movement (Current feedback
position) therefore, after resetting the forced stop, origin coordinate processing such as home position return is
not necessary.
ON
OFF
A
ctual speed
Forced stop (EMI)
Current command position is updated according
to movement durin
g
forced sto
p
.
Current command
position
Command speed
Stop procedure depends on the specifications
and settings of the servo amplifier.
For forced stops, there are an external forced stop using an input signal through the forced stop input
connector and a software forced stop signal (SEMI) from a system command bit.
Also, a system error (system status code E
h) such as a SSCNET communication error activates the
forced stop. The cause of the forced stop can be confirmed using monitor number 0401.
API LIBRARY
To turn ON/OFF the software forced stop command (SEMI), set
SSC_CMDBIT_SYS_SEMI to the command bit number of the
sscSetCommandBitSignalEx function.
To check if during forced stop (EMIO) is ON/OFF, set
SSC_STSBIT_SYS_EMIO with the sscGetStatusBitSignalEx or
sscWaitStatusBitSignalEx function.