


















5 - 38
5. OPERATIONAL FUNCTIONS
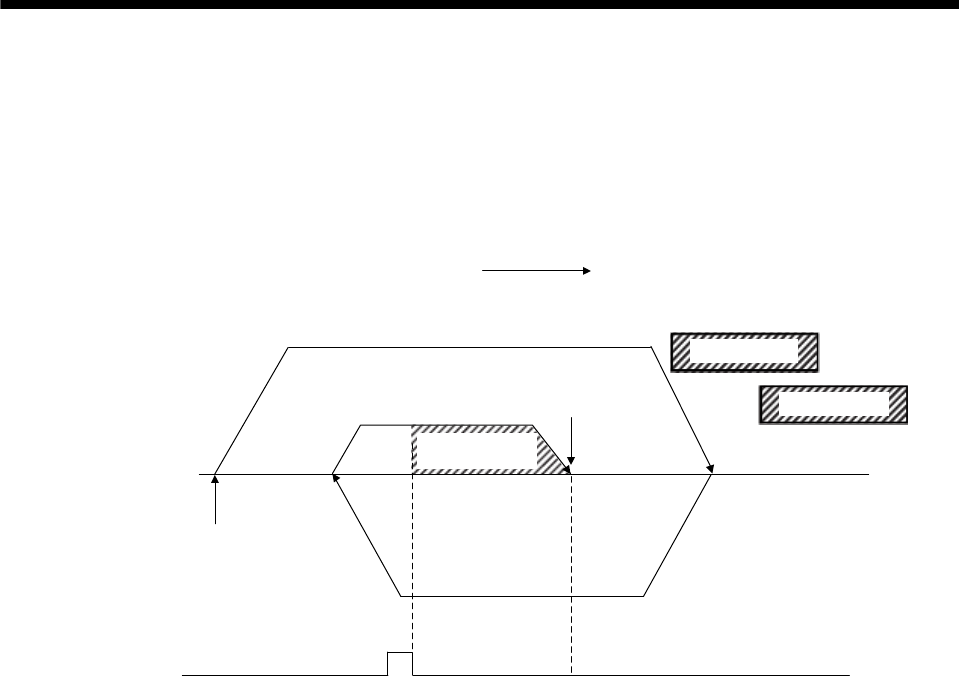
5.5.12 Home position return using a scale home position signal detection method
Home position return is performed using a home position signal (Z-phase) on a linear scale. After detecting the
proximity dog, move in the opposite direction of the home position and the position where a home position
signal is detected is defined to be the home position. When multiple home position signals on the linear scale,
the nearest home position signal to the proximity dog is defined as the home position.
Creep speed
(Note 3)
Proximity dog
(Note 1, 2)
Limit switch
Speed
Amount of home
position shift
Home position signal
(Z-phase)
Home position return speed
Home position return direction
Home
position
Start operation
Note 1. The amount of home position offset is set to the amount of shift in the home position (parameter No.0248, 0249).
2. If the amount of shift in the home position is 0, the servo stops on the Z-phase.
3. When a limit switch signal is detected, an alarm occurs and execution of return to home position is terminated.
Set the proximity dog signal before the limit switch signal.
Set the proximity dog signal to overlap with the limit switch signal as shown above.