

















6 - 144
6. APPLICATION FUNCTIONS
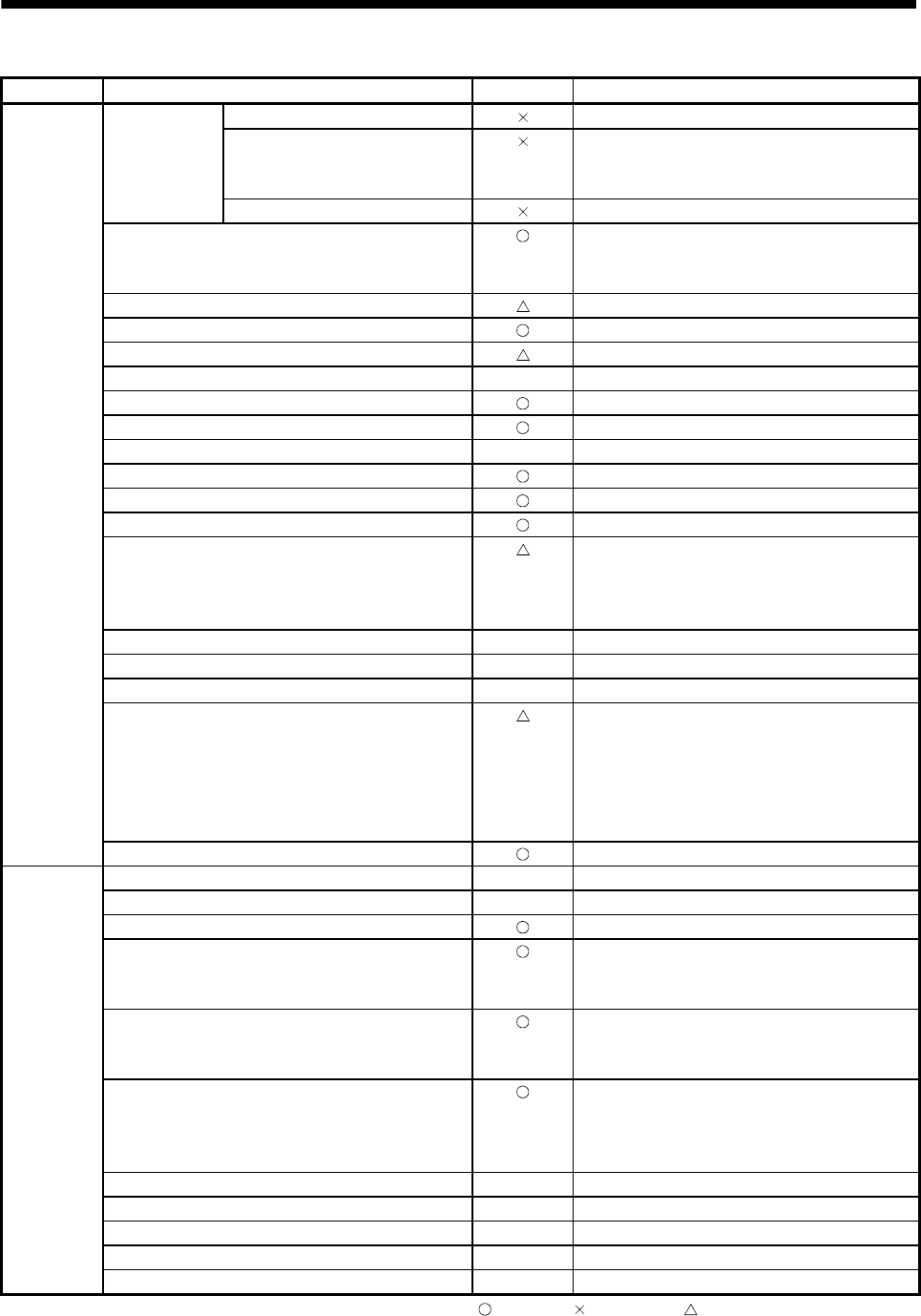
Classification Function Compatibility Remarks
Application
function
Command
change
Speed change Speed change error signal (SCE) turns ON.
Change of time constants Acceleration time constant change error signal
(TACE), or deceleration time constant change
error signal (TDCE) turns ON.
Position change Position change error signal turns ON.
Backlash When following up by current feedback position, a
position that takes into account the backlash is is
followed up.
Position switch Determined by the current feedback position.
Completion of operation signal Output after position control switch.
Interference check function Interference check function is invalid.
Home position search limit —
Gain switching
PI-PID switching
Home position set —
Absolute position detection system
Home position return request
High response I/F
Other axes start When current command position is set to the axis
j
udgment coordinate of start condition, a current
command position matching the current feedback
position is determined.
Digital input/output —
Servo amplifier general input/output —
Dual port memory exclusive control —
Pass position interrupt When current command position is set to the axis
judgment coordinate of start condition, a current
command position matching the current feedback
position is determined. Therefore when a current
command position is specified, it may not be
correctly determined.
Mark detection
Auxiliary
function
Reading/writing parameters —
Changing parameters at the servo —
Alarm and system error
Monitor function The speed limit value output to the servo amplifier
is output for the "travel speed" during continuous
operation to torque control mode.
High speed monitor function The speed limit value output to the servo amplifier
is output for the "travel speed" during continuous
operation to torque control mode.
Interrupt During continuous operation to torque control is
notified from when the output torque reaches the
torque settle width and press time passes, until
return to position control mode.
Interrupt output cycle —
Command data update cycle —
User watchdog function —
Software reboot function —
Parameter backup —
: Usable : Unusable : Restriction —: Not applicable