

















6 - 143
6. APPLICATION FUNCTIONS
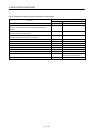
6.31.7 Combinations of continuous operation to torque control and other functions
The following shows the combinations of continuous operation to torque control with each function.
Classification Function Compatibility Remarks
System
function
SSCNET
communication
method
SSCNET
/H
SSCNET
Control mode Standard mode
Interface mode
Operation
function
JOG operation —
Incremental feed —
Automatic operation Automatic switch/Manual switch can be selected.
Linear interpolation Linear interpolation . When starting up a
continuous operation to torque control point,
"continuous operation to torque control error
(operation alarm 5D, detail No.0A)" occurs.
Home position return —
Home position reset function —
Application
function
Command unit Electronic gear
Speed unit Speed unit Set the continuous operation to torque control
speed limit value in speed units.
Speed units multiplication factor
Speed limit The continuous operation to torque control speed
limit value is restricted by speed limit value
(control parameter No.0222, No.0223)
Acceleration/
deceleration
Linear acceleration/deceleration
Smoothing filter Invalid during continuous operation to torque
control.
Start up speed validity Valid when starting up operation point. However, it
is invalid during continuous operation to torque
control.
S-curve acceleration/deceleration
(Sine acceleration/deceleration)
Invalid during continuous operation to torque
control.
Servo off Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Forced stop Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Stop operation Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Rapid stop operation Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Limit switch (stroke end) Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Software limit Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Interlock Control mode is automatically changed to position
control mode after an operation alarm occurrence.
Rough match output At continuous operation to torque control points
the rough match turns ON when the distance
remaining based on the position data of the point
table is within the rough match output range.
Torque limit During continuous operation to torque control and
torque limit, torque limit stays OFF.
: Usable : Unusable : Restriction —: Not applicable