



















6 - 53
6. APPLICATION FUNCTIONS
6.21 Absolute position detection system
By using a servo motor compatible with the absolute position detection system, the positioning control can be
made by the absolute position detection system.
In the absolute position detection system, if machinery position is determined at the system startup, there is no
need to execute the home position return because the absolute position is restored at system startup.
Determination of machinery position is made by the home position return. At home position return and power
on, be sure to execute the operation referring to the procedures described in Section 6.21.2.
API LIBRARY
Use the sscChange2Parameter/sscCheck2Parameter function to set/get the
absolute position detection system.
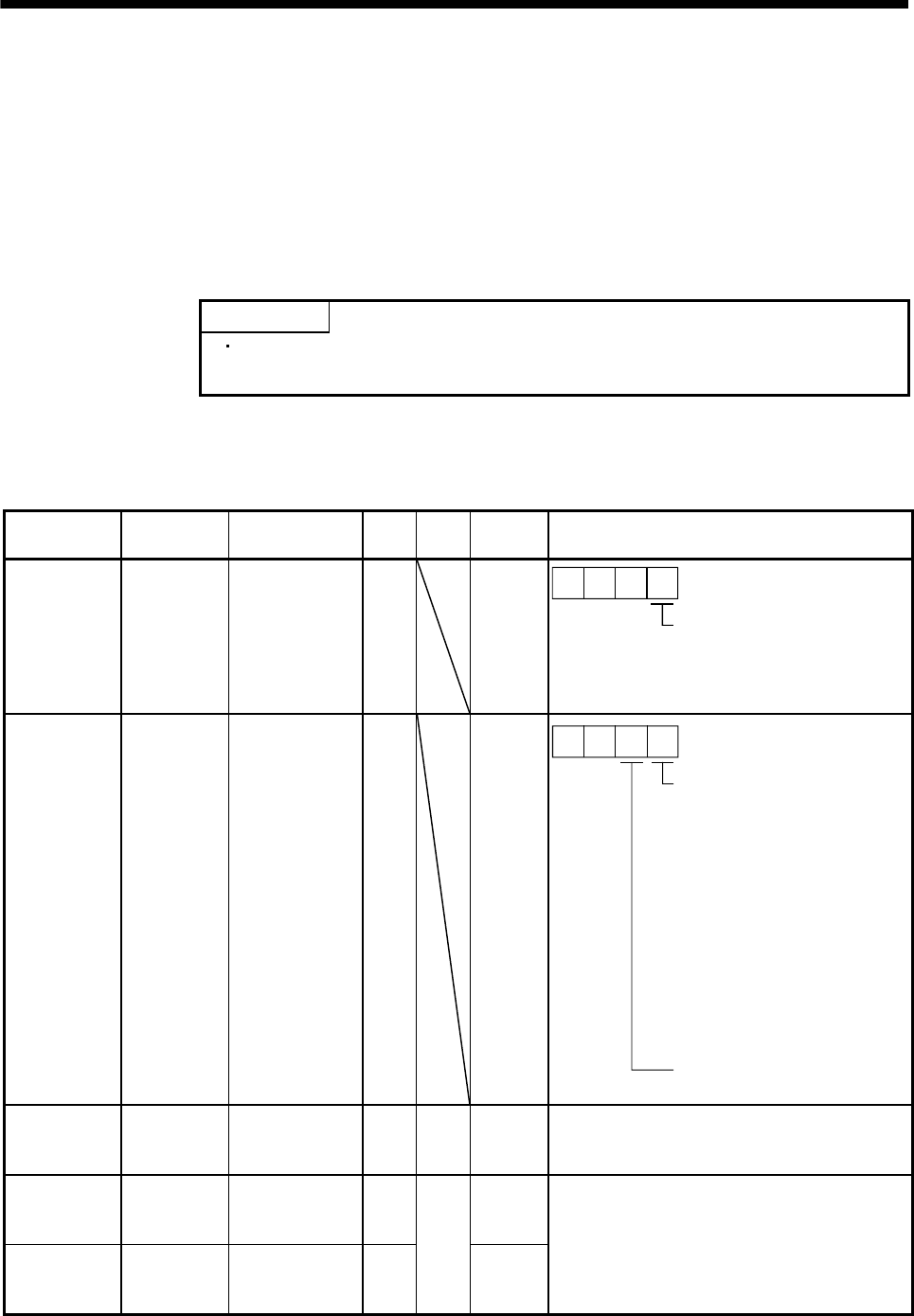
6.21.1 Parameters
The parameters related to the absolute position detection system are shown below.
Parameter No.
(Note)
Abbreviation
Name
Initial
value
Unit
Setting
range
Function
1102 *ABS Absolute position
detection system
0000h 0000h to
0001h
000
Absolute position detection system
selection
0: Used in incremental system
1: Used in absolute position
detection system
0241 *OPZ2 Home position
return option 2
0000h 0000h to
0011h
00
Absolute position data
Set the validity/invalidity of
restoring the absolute position.
0: Invalid
1: Valid
When 1 is set, the absolute
position is restored at system
startup, based on the home
position multiple revolution data
and the home position within 1
revolution position.
When 0 is set, the position at
system startup is defined to be 0.
Perform the home position return
prior to automatic operation and
linear interpolation.
Change of absolute position data
on home position reset
024D *LS0 Home position
multiple revolution
data
0000h rev 0000h to
FFFFh
Set the home position multiple revolution data.
024E *CY0L Home position
within 1 revolution
position (lower)
0000h pulse 0000h to
FFFFh
Set the within 1 revolution home position.
024F *CY0H Home position
within 1 revolution
position (upper)
0000h 0000h to
FFFFh
Note. The settings for the parameters with a * mark at the front of the abbreviation are validated when the system is started.