



















3 - 61
be shown.
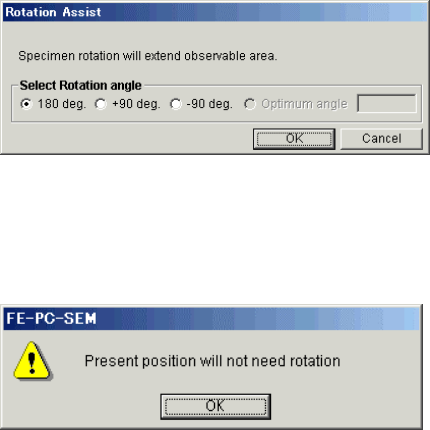
(a) When the present position is 2mm or less near to the X or Y limit
OK rotates the stage and move X and Y axes so as the specified point comes under the
beam.
(b) When the present position is 2mm or more far from the X and Y limit
In this case, stage is not rotated.
In above cases, computer calculates X and Y coordinates to move the target or present
position under the beam using specified angle and deviance of the mechanical rotation
center from the ideal center. Possibly the resulted X or Y coordinate may be out of its
movable range. In such a case, a message indicating that the rotation assist unable is
shown and stage rotation is canceled.
3.5.7.13 Rotation / tilt eucentric function and calibration
The rotation eucentric function is to keep the present field of view after specimen rotation. It
calculates XY position that recovers the present viewing position after rotation axis is driven using
the present XY position and the angle to be rotated. XY axes are driven to the calculated point
together with rotation axis.
In addition, the tilt eucentric function drives XY axes together with Tilt axis so that the previous
viewing point will be kept after tilting operation.
To improve accuracy of the functions, calibration of the following error factors are provided.
(a) Measure and correct the deviation between rotation center axis and beam irradiation
position.
(b) Measure and correct the deviation between tilt center axis and beam irradiation position.
(c) Measure the specimen height error and compensate the rotation center and the tilt center
axes.