



















5 - 1
5.1 Utility Package Functions
5
UTILITY PACKAGE (GX Configurator-TI)
CHAPTER5 UTILITY PACKAGE (GX Configurator-TI)
5.1 Utility Package Functions
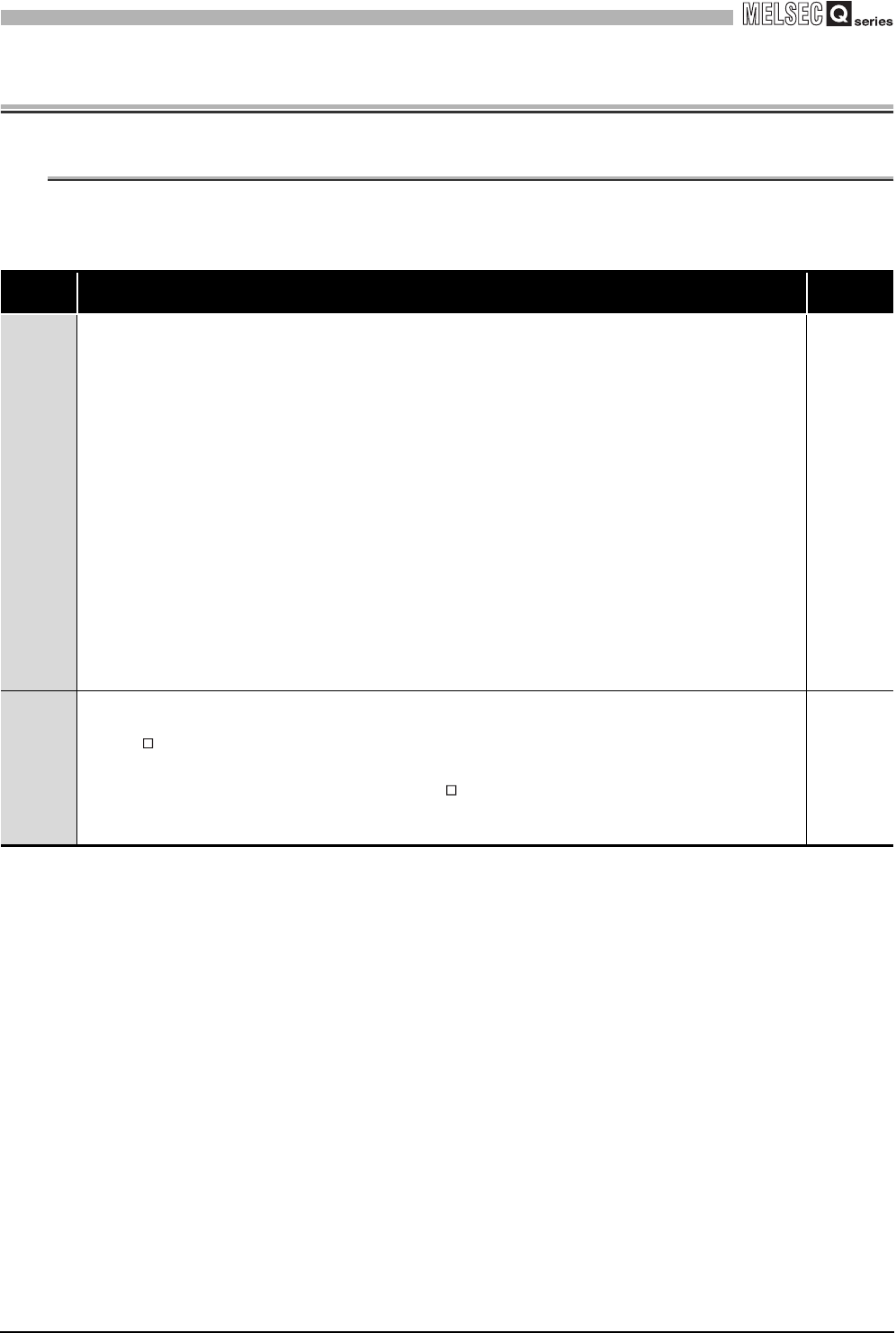
Table 5.1 shows a list of the utility package functions.
Table 5.1 Utility Package (GX Configurator-TI) Function List
Function Description
Reference
section
Initial
setting
(1) Make initial setting for operating the Q68TD-G-H02(H01) channel-by-channel.
Set the values of the items which require initial setting.
Section 5.4
•Conversion enable/disable setting •Rate alarm lower limit value
•Averaging processing selection •Scaling range lower limit value
•Time/count/moving average/time constant setting •Scaling range upper limit value
•Warning output enable/disable setting (Process alarm) •Scaling valid/invalid setting
•Thermocouple type •Scaling width lower limit value
•Process alarm lower lower limit value •Scaling width upper limit value
•Process alarm lower upper limit value •Conversion setting for disconnection detection
(Disconnection state conversion setting)
*1
•Process alarm upper lower limit value
•Process alarm upper upper limit value •Conversion setting value for disconnection
detection (Conversion setting for disconnection
state value)
*1
•Warning output enable/disable setting (Rate alarm)
•Rate alarm warning detection period
•Rate alarm upper limit value
(2) The data for which initial setting has been completed is registered in the parameters for the programmable
controller CPU, and automatically written to the Q68TD-G-H02(H01) when the programmable controller CPU
changes to the RUN status.
Automatic
refresh
setting
(1) Set the automatically refreshed Q68TD-G-H02(H01) buffer memory channel-by-channel.
Section 5.5
•Conversion completion flag •Warning output flag
•CH Measured temperature value
•Disconnection detection flag (Disconnection state monitor
flag)
*1
•Error code
•Setting range
•CH Scaling value
(2) The values stored in the Q68TD-G-H02(H01) buffer memory where automatic refresh setting was made are
automatically read or writhen when the END instruction of the programmable controller CPU is executed.