
















11 - 29
11. PARAMETERS
Parameter
No.
Symbol Name
Initial
Value
Units
Setting
range
Function
When tandem
drive is being
used
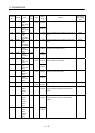
0240 *OPZ1 Home
position
return
Option 1
0000h 0000h
to 112Dh
Home position return direction
Set the home position return direction
with respect to the proximity dog.
Or the movement direction for creep
speed movement.
0: - direction
1: + direction
2: Shortcut direction (Note 1)
Proximity dog input polarity
Set the input polarity for the proximity
dog
0: Normally closed contact
1: Normally open contact
Home position return method
(Note 1), (Note 2)
Set the method for home position
return.
0: Dog method
2: Data set method
3: Stopper method
4: Dog cradle method
5: Limit switch combined method
6: Scale home position signal
detectionmethod
7: Limit switch front end method
8: Dog front end method
C: Z-phase detection method
D: Scale home position signal
detection method 2
Home position signal re-search
(Note 2)
Set "1" when using an incremental
encoder or incremental linear scale.
0: Do not search again
1: Master searching again
Note 1. Shortcut direction is available only by Z-
phase detection method.
2. Can be changed while system is running.
(Software version A5 or later)
Master
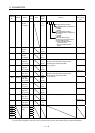
0241 *OPZ2 Home
position
return
Option 2
0000h 0000h
to 0011h
Change of absolute position data on
home position reset
If 1 is set, the home position multiple
revolution data and home position
within 1 revolution position are renewed
when the home position is reset.
00
Absolute position data
Set the validity/invalidity of restoring
the absolute position.
0: Invalid (The position at system
startup is defined to be 0.
Home position return
must be executed prior to
performing automatic
operation or linear
interpolation operation.)
1: Valid (absolute position is set at
startup based on the home
position multiple revolution
data and the home position
within 1 revolution position.)
0: Invalid
1: Valid
Master