



















5 - 29
5. OPERATIONAL FUNCTIONS
5.5.5 Home position return using a data set method
The command position at the start operation of the home position return is defined as the home position. It is
necessary to move to home position using JOG operation or something similar in advance.
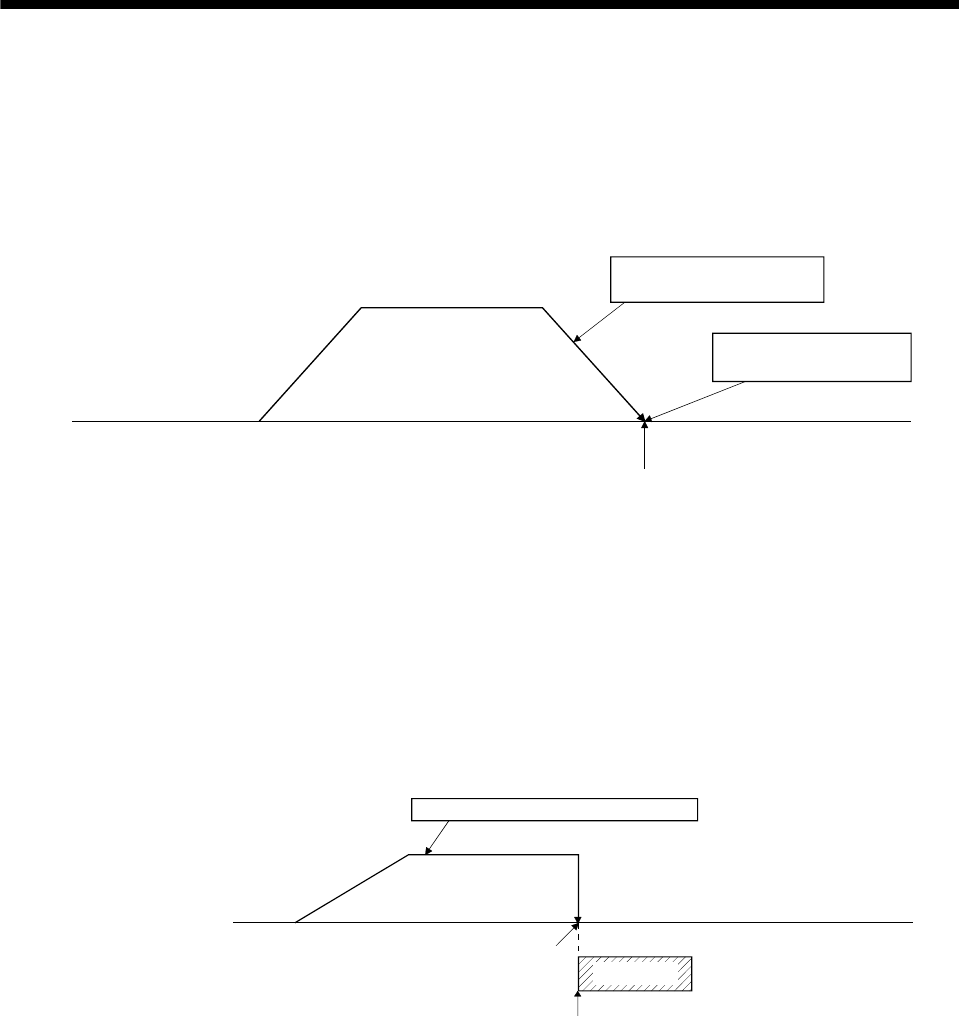
(1) When the home position is the current command position
Speed
Move to home position using JOG
operation or something similar.
The current command position is
changed to the home position
coordinates.
Start operation
Note. If limit switch signal is turned off when operation is started, a limit switch (operation alarm A0, detail 01) occurs and home
position return cannot be executed.
5.5.6 Home position return using a stopper method
When start operation is performed for home position return using stopper method, droop pulse is cleared and
current feedback position is defined as the home position.
It is necessary to move using JOG operation or something similar in advance and to execute the collision stop
from the stopper using torque limit functions. For the torque limit, refer to Section 6.12.
Speed
Stopper
Move using JOG operation or something similar
Start operation
Home potion
Note1. If torque limit effective signal (TLC) is turned off when operation is started, "Not limiting torque" (operation alarm 95, detail
01) occurs and home position return cannot be executed.
2. If the home position return direction and the stopper method direction are opposite, a home position return direction error
(operation alarm 94, detail 01) occurs and the home position return cannot be executed.